I ricercatori progettano protesi per dita stampate 3D completamente articolate
Restauro cosmetico in silicone di medio e anulare con tono della pelle abbinato al soggetto.
Nonostante l’ampia gamma di protesi disponibili oggi, quelle con perdita parziale delle mani sono spesso lasciate fuori al freddo e con una disabilità che spesso si rivela estremamente difficile a causa di una significativa perdita di destrezza. Ricercatori dell’Università del Colorado e della Rice University mirano a cambiare questo aspetto con un nuovo design per una protesi di dito completamente articolata, con un attuatore autonomo. Il progetto e le prove successive sono dettagliati nel loro articolo pubblicato di recente, ” Progettazione e valutazione di una protesi mobile con dita a trasmissione distale con trasmissione autonoma per persone con perdita parziale della mano “.
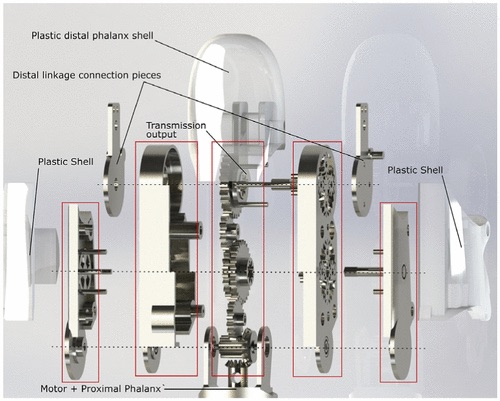
Utilizzando la sinterizzazione laser diretta (DMLS) diretta, il gruppo di ricerca ha creato una trasmissione ad ingranaggi per la porzione mediale della falange del dito. La trasmissione si collega quindi al motore CC, consentendo la trasmissione della coppia attraverso il giunto PIP. Questo nuovo design presenta un dispositivo automatico simile alla dimensione dell’indice di una donna nel 25-50 ° percentile. Mentre questa è una dimensione media, in futuro il dimensionamento potrebbe essere possibile per gli altri amputati. Per un corretto equilibrio e ‘percezione della protesi come un carico esterno portato sull’arto residuo’, gli scienziati lo hanno progettato con un peso simile a un dito umano.
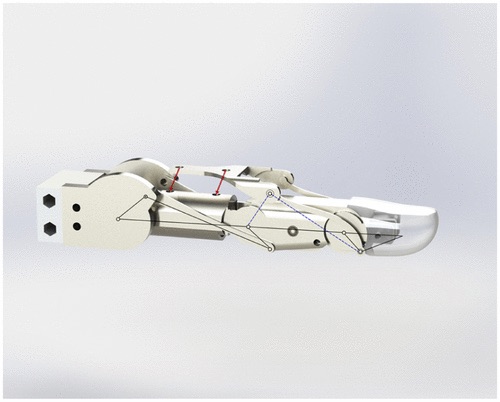
“Le falangi delle dita e il meccanismo di underactuation formano un collegamento a sei barre ed è essenzialmente una sovrapposizione di due collegamenti a quattro barre comunemente usati per sottovalutare dispositivi commerciali e di ricerca a due falangi”, affermano i ricercatori. “Il sistema di collegamento accoppia il movimento di ogni giunto IP per fornire una traiettoria di flessione adatta a una varietà di prese utilizzate nell’ADL.
Il test era incentrato sulla valutazione della forza e della flessione della punta delle dita, utilizzando un controller Escon 24/2 di Maxon Motors alimentato a 12 V e una cella di carico Futek LSB200 alimentata a 24 V per il collegamento con il polpastrello a diversi angoli. I ricercatori hanno anche utilizzato una scheda di acquisizione dati Quanser Q8-USB usando MATLAB / Simulink per raccogliere quanto segue:

Forza della cella di carico raccolta
Assorbimento di corrente del motore
Voltaggio
Nel valutare la forza del dito protesico, i ricercatori posizionano la cella di carico a contatto con la punta del dito, mentre il controller aziona il motore, guidando il dito verso la cella di carico. Dopo che i ricercatori hanno impostato i seguenti passaggi:
Il motore è stato alimentato per 0,5 secondi dopo aver rilevato il carico impulsivo.
La forza di presa è stata registrata.
La cella di carico è stata spostata per contattare il polpastrello per misurare la velocità di flessione.
La velocità di flessione è stata determinata dividendo il tempo impiegato dal dito per contattare la cella di carico dalla sua posizione completamente estesa a causa dello spostamento angolare del dito.
I ricercatori hanno ripetuto le prove 15 volte. Quando hanno iniziato a valutare le singole fasi del cambio, il team ha realizzato che sarebbe necessario un ulteriore esame per valutare i contributi della coppia di ingranaggi del volto all’efficienza della trasmissione. La meccanica delle dita richiederà anche più validazione, insieme a ulteriori test di fatica.
“Il lavoro continuo sul dito alimentato ha portato a una trasmissione di potenza più compatta e più rapida e il lavoro futuro includerà una valutazione più accurata dell’efficienza della trasmissione per determinare il beneficio dell’uso di leve del cambio e le modifiche apportate alla struttura degli stadi dell’ingranaggio planetario, “Hanno concluso i ricercatori. “Interessanti gli ingranaggi alternativi che aumentano la riduzione complessiva della trasmissione mentre si riduce il numero di stadi del cambio necessari, oltre a un esame più approfondito del processo di lucidatura degli ingranaggi.
“Il lavoro includerà anche perfezionamenti all’attaccatura degli arti residui che meglio accolgono gli individui con amputazioni distali all’MCP, nonché miglioramenti alla robustezza e al movimento anatomico del sistema di barre cinematiche. Le imminenti iterazioni del dito includeranno anche miglioramenti delle sue prestazioni in meccanismi di opposizione e sicurezza per proteggere i componenti in casi di carico estremi o imprevisti.
“