Sviluppo di attuatori morbidi stampati in 3D per bracci robotici
Mentre la stampa 3D e l’elettronica continuano ad avanzare – insieme alla robotica – gli attuatori morbidi stanno diventando un grande argomento di studio, come lo studente della tesi Hong Fai Lau delinea negli attuatori gonfiabili stampati in 3D recentemente pubblicati – Progettazione e sviluppo di attuatori morbidi per un pneumatico – Braccio robotico morbido attivato . ” Studiando il processo di progettazione, ma anche i parametri e le interdipendenze, Hong Fai Lau sperimenta attuatori gonfiabili con stampa 3D per l’eventuale possibilità di utilizzarli in un braccio robotico che integra due gradi di libertà.
Hong Fai Lau si rende conto che sta avvenendo un serio cambiamento con l’avvento degli attuatori morbidi e, più specificamente, quelli che sono gonfiabili:
“In un tipico attuatore realizzato con materiali rigidi, ad esempio un attuatore elastico in serie o un attuatore a rigidità variabile, gli schemi, i componenti e il controllo definiscono insieme la funzione del dispositivo. In un attuatore gonfiabile morbido, tuttavia, la sua funzione dipende esclusivamente dal suo design meccanico. “
La creazione di tali attuatori non è un’impresa facile, tuttavia, accompagnata da un “elenco esaustivo” di parametri. Hong Fai Lau si rende conto che l’attuatore con il maggior potenziale è l’Elastic Inflatable Actuator (EIA), un dispositivo che funziona sotto pressione positiva. Altri attuatori con grandi promesse sono il tipo di piegatura EIA e l’attuatore pneumatico pneumatico rotativo, caratterizzato da uno strato di tessuto “anelastico” che elude la necessità di un meccanismo esterno.
Per la stampa 3D in questa ricerca, Hong Fai Lau ha esplorato sia la fusione multi-jet che PolyJet, utilizzando un design adatto per un braccio robotico morbido con due DoF.
L’autore ha trovato questa parte del progetto particolarmente stimolante in quanto il progetto ha richiesto due diverse fasi basate sulla complessità, con tutti i seguenti dettagli di progettazione:
Ampia gamma di movimento
Capacità di agire sotto pressione
Facilità nella produzione
Innanzitutto, sono stati creati gli attuatori lineari, studiando sia la forma che i materiali adatti. Successivamente, l’analisi è stata utilizzata per creare un progetto meccanico completo per il progetto di ricerca, migliorato sia con la simulazione che con la sperimentazione. Nell’esplorare tutte le sfide nella creazione di tale lavoro, l’autore sottolinea che è sempre meglio cercare ispirazione dalla natura.
In futuro, il ricercatore prevede di vedere un maggiore utilizzo di materiali flessibili per la stampa 3D, insieme a “applicazione nel dominio rotazionale”. Sono previsti anche l’integrazione dell’ottimizzazione dei parametri di progettazione e un’ulteriore esplorazione delle parti di stampa 3D per il braccio robotico, oltre alla creazione di componenti più leggeri.
“In conclusione, l’attuatore rotativo gonfiabile stampato in 3D realizzato è un primo prototipo concettuale efficace per il futuro braccio robotico morbido con due DoF”, ha affermato l’autore.

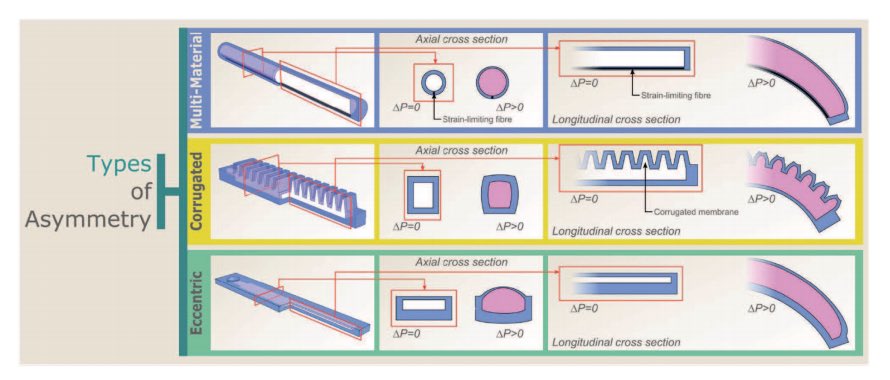
Vari tipi di asimmetria incorporati in VIA di tipo flessione. Ristampato da Advanced Materials, vol. 29, n. 43, Benjamin Gorissen, Dominiek Reynaerts, Satoshi Konishi, et al., Elastic Inflatable Actuators for Soft Robotics Applications, 2017, con il permesso di John Wiley and Sons. © 2017, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim 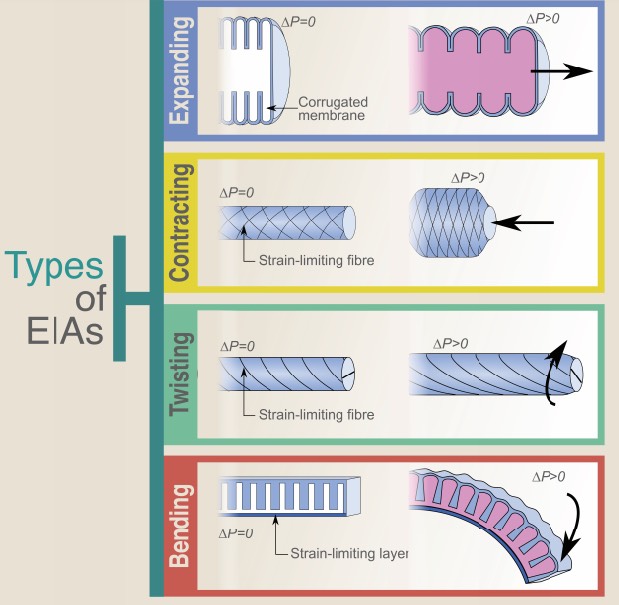
Vari tipi di VIA. Ristampato da Advanced Materials, vol. 29, n. 43, Benjamin Gorissen, Dominiek Reynaerts, Satoshi Konishi, et al., Elastic Inflatable Actuators for Soft Robotics Applications, 2017, con il permesso di John Wiley and Sons. © 2017, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim