Ricercatori cileni sperimentano la stampante 3D per arrampicata Koala
I ricercatori dell’Università del Cile Maximiliano Vélez, Efrén Toala e Juan Cristóbal Zagal hanno sviluppato una nuova prospettiva per la fabbricazione in edilizia, sviluppando una nuova macchina che abbina un robot da arrampicata a una stampante 3D. Rilasciando le loro scoperte nel recente pubblicato ” Koala 3D: una stampante 3D per arrampicata continua “, gli autori tentano di semplificare i metodi per la fabbricazione di oggetti su larga scala, creando hardware che può “navigare continuamente lungo un oggetto fabbricato”.
Oggi le stampanti 3D vengono utilizzate più frequentemente nei progetti di costruzione e coloro che utilizzano materiali come il cemento, dallo sviluppo di arte e mobili alla realizzazione di pannelli in schiuma , alla creazione di concetti per interi villaggi stampati in 3D . L’hardware è in genere limitato a rendere gli oggetti più piccoli delle proprie strutture, anche se gli autori sottolineano che uno dei vantaggi della stampa 3D è la capacità di realizzare parti che “non sono sostanzialmente inferiori al volume della macchina completa”.
Con il nuovo concetto di macchina che stampa mentre si muove lungo l’oggetto da fabbricare (e non solo una parte creata da una piattaforma di stampa 3D), i ricercatori approfondiscono i processi di produzione additiva integrati con:
Assemblaggio robot collaborativo autonomo
Costruzione a slittamento verticale
Truss formatrici per applicazioni aerospaziali
Gli autori hanno originariamente elaborato un concetto per la parte della testata della stampante e la parte rampante, intesa a lavorare tramite una coppia di morsetti azionati roboticamente, con il meccanismo inferiore nella parte inferiore del corpo della stampante e il meccanismo superiore che si sposta tra la parte superiore e inferiore . Servomotori di piccole dimensioni sono stati utilizzati per il bloccaggio grazie alle loro proprietà compatte e leggere, oltre a offrire una coppia elevata. Il serraggio è stato eseguito con un movimento ad anello aperto.
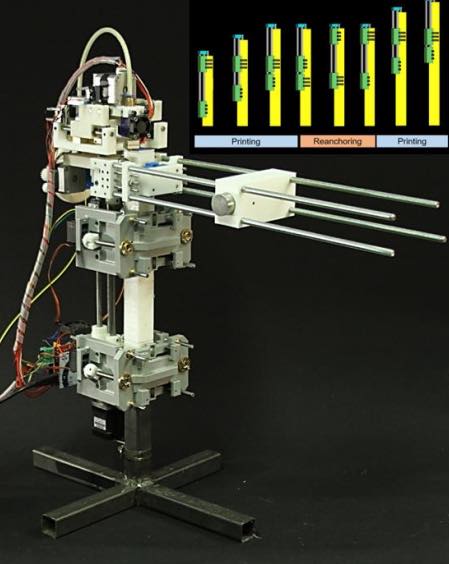
Koala 3D montato sulla sua base di stampa. Ingresso superiore: fasi di stampa e rianimazione del processo di fabbricazione
“La stampante può essere scomposta in due principali sottosistemi. Uno è il palcoscenico verticale per la rianimazione, un movimento verticale preciso durante la stampa, oltre a trasportare l’elettronica ”, hanno spiegato gli autori. “L’altro sottosistema è la fase di posizionamento xy per lo spostamento dell’estrusore della stampante. Questa fase porta anche il sistema di impulsi materiali. Le seguenti sottosezioni descrivono la progettazione di ciascun sottosistema “.
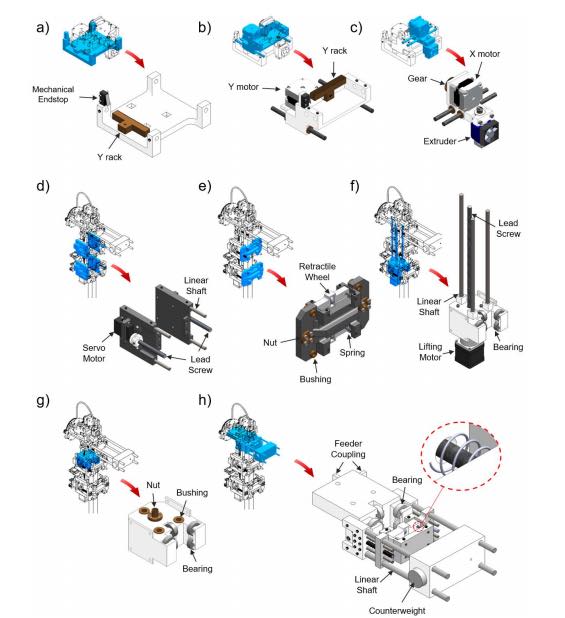
Dettagli delle parti del progetto finale della stampante 3D Koala. (a) La base della parte della stampante supporta il rack y, i binari y e l’interruttore yendstop. (b) Il carrello y supporta il motore y, il rack x, i binari x e il finecorsa x. (c) Il carrello x supporta il motore x e l’estrusore. (d) La base del servo è fissata ai carrelli inferiori e centrali della parte rampicante. Ogni sottoassieme servo aziona una vite che trasmette la forza alla pinza (e) Le ganasce in LCC e CCC con due ruote retrattili consentono di guidare il movimento del robot e ritrarre quando le pinze devono ancorarsi (f) Carro di serraggio inferiore Tenere fermo il motore di sollevamento e guidare vite. (g) Il carrello di serraggio centrale CCC ha un dado che si unisce alla vite di comando da LCC (h) Il carrello superiore non è motorizzato e ha un contrappeso per spostare il baricentro.
Il sistema di posizionamento dovrebbe essere più robusto, offrendo miglioramenti rispetto alle tipiche stampanti 3D, con un palcoscenico che copre la gamma di movimento dell’estrusore di 45 mm x 45 mm sul piano xy.
“Ci aspettavamo di produrre travi verticali con una sezione di 30 mm x 30 mm con questo intervallo di movimento. L’intervallo di movimento extra (maggiore del 50% su ogni dimensione) era destinato a consentire all’estrusore di spurgare al di fuori dell’area di stampa e di introdurre potenzialmente alcune caratteristiche sulla superficie del raggio prodotto “, hanno spiegato gli autori.
“È stato osservato che la maggior parte delle fasi di posizionamento xy utilizzate sulle stampanti 3D si basano su cinghie di movimento guidate da pulegge dentate. Il motore di guida viene spesso tenuto separato dalle guide di movimento e una puleggia aggiuntiva viene utilizzata per trasmettere energia al palco. Il design era troppo voluminoso per i nostri scopi. Pertanto, abbiamo optato per posizionare i motori di azionamento nel mezzo delle rotaie e la potenza trasmessa mediante il meccanismo a pignone e cremagliera. Ciò ha richiesto anche un minor numero di componenti. “
Grazie al design aerodinamico, al peso ridotto e alle “prestazioni riportate”, l’estrusore J-Head E3D è stato scelto per il nuovo concetto di stampa 3D.
“Abbiamo utilizzato il design di impulsi di materiale Bowden disponibile gratuitamente, che è un’unità di impulsi di materiale situata separatamente dalla testina di stampa”, hanno affermato gli autori. “Il materiale viene guidato nell’estrusore mediante un tubo di plastica.”
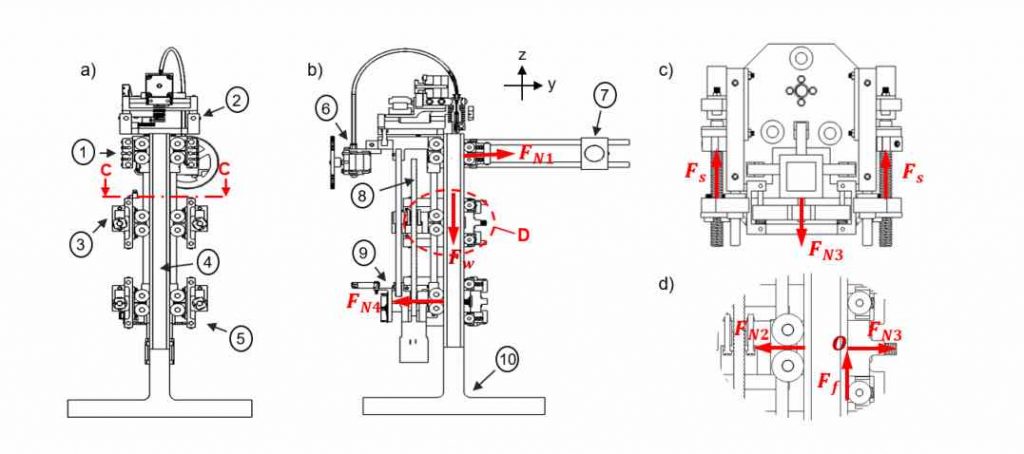
a) Vista frontale del taglio longitudinale. 1 Carrello superiore 2 Fase xy 3 Carrello centrale 4 Colonna stampata 5 Carrello di serraggio inferiore b) Schema del corpo libero quando Koala è in fase di stampa. In questa fase il carrello di serraggio centrale tiene l’intera macchina mentre il carrello di serraggio inferiore guida il movimento attraverso la colonna. 6 Alimentatore materiale 7 Contrappeso 8 Vite di comando 9 Scheda di controllo c) Vista taglio CC. Schema del corpo libero della pressa di serraggio centrale durante la fase di stampa (d) dettaglio D. Forza il CCC durante il processo di stampa.
Una serie di undici travi campione è stata stampata in 3D in diverse dimensioni, che variano da 350 mm a 850 mm, con l’aggiunta di una parte più piccola anche fabbricata.
“Sono stati condotti numerosi esperimenti per caratterizzare e comprendere il concetto proposto. È stato dimostrato che la stampa 3D è possibile utilizzando lo schema di stampa-rianchoring-stampa proposto. Esperimenti e valutazioni delle prestazioni sono state eseguite su scala desktop con materiali comunemente usati per la stampa 3D (plastica PLA) “, hanno concluso i ricercatori.
“Abbiamo identificato un limite teorico all’altezza degli oggetti prodotti utilizzando questi materiali. È stato causato dalla ridotta resistenza meccanica del PLA ma non dal processo di fabbricazione stesso. L’uso di materiali più forti servirà certamente ad estendere questi limiti. Abbiamo rilevato, caratterizzato e proposto soluzioni per tre importanti problemi nell’arrampicata su stampanti 3D. I problemi sono (1) la caduta della macchina dopo il rianchoring, (2) l’oscillazione strutturale ad alti rapporti d’aspetto e (3) l’allineamento iniziale tra parte e base. Affrontare questi problemi sarà importante nello sviluppo di macchine autonome che possono arrampicarsi lungo le stesse strutture che producono. “
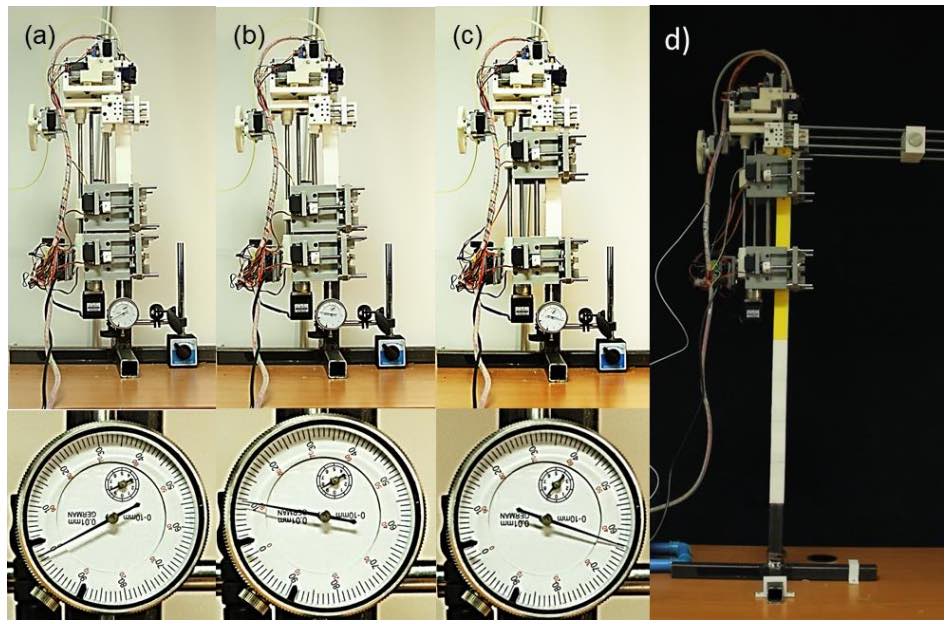
(ac) Esempi di utilizzo di un micrometro per misurare la caduta della macchina durante il rianchoring. La macchina è inizialmente sospesa dal CCC. Successivamente, (a) LCC si impegna e CCC si disinnesta. (b) Il movimento successivo del CCC provoca un calo maggiore. (d) Un esempio di produzione di una grande trave. Il video di supporto 2 mostra la macchina in azione durante la stampa di questo raggio.
In futuro, gli autori hanno anche in programma di semplificare il meccanismo utilizzato per l’ancoraggio, nonché di creare un design più semplice per eliminare l’uso del contrappeso. Insieme a questi piani, hanno anche in programma di perfezionare il sistema di arrampicata con meno attuatori e meno peso per prestazioni migliori.