La polimerizzazione a due fotoni produce microrobot stampati in 3D
La luce è una parte importante della stampa 3D; in quasi tutte le versioni della tecnologia, la luce è ciò che solidifica il materiale in strati per creare un oggetto. Può anche essere utilizzato anche nella stampa 4D, per generare movimento. In uno studio intitolato ” Polimerizzazione a due fotoni per la stampa 3D di microrobot a luce controllata “, un gruppo di ricercatori usa la luce per controllare microscopici robot stampati in 3D.
 Come spiegano i ricercatori, la luce può anche essere utilizzata per generare effetti come il calore. Nella microfluidica, il riscaldamento locale viene generato utilizzando superfici metalliche e nanoparticelle metalliche. Ciò ha permesso l’azione della valvola, il controllo del flusso e la miscelazione. Può anche fungere da catalizzatore per reazioni chimiche ed è stato utilizzato nella terapia del cancro. C’è una limitazione quando si usano strati metallici in dispositivi microfluidici, tuttavia – di solito sono fissati su una determinata regione mentre il movimento e la posizione delle nanoparticelle sono difficili da controllare.
Come spiegano i ricercatori, la luce può anche essere utilizzata per generare effetti come il calore. Nella microfluidica, il riscaldamento locale viene generato utilizzando superfici metalliche e nanoparticelle metalliche. Ciò ha permesso l’azione della valvola, il controllo del flusso e la miscelazione. Può anche fungere da catalizzatore per reazioni chimiche ed è stato utilizzato nella terapia del cancro. C’è una limitazione quando si usano strati metallici in dispositivi microfluidici, tuttavia – di solito sono fissati su una determinata regione mentre il movimento e la posizione delle nanoparticelle sono difficili da controllare.
Nello studio, i ricercatori hanno integrato le strutture metalliche in un nuovo tipo di microbot guidato dalla luce. Hanno utilizzato la polimerizzazione a due fotoni per la stampa 3D di robot in scala nanometrica con caratteristiche quali interni cavi per il trasporto di materiale, nonché un’azione siringa che consente ai microrobot di caricare e scaricare il carico.
(a) La resa di un artista di una moltitudine di micro-robot guidati dalla luce che lavorano insieme per sondare una cella. (b) Un microrobot cavo, progettato per il trasporto di materiale, che interagisce con una goccia d’olio. (c) Immagine al microscopio elettronico a scansione del microrobot cavo. Una maschera è fabbricata sulla parte superiore della struttura per assicurare l’esposizione di solo determinate regioni mediante deposizione di metallo-vapore.
“Il fotoresist che usiamo nella fabbricazione di questi robot leggeri è praticamente trasparente alla lunghezza d’onda del fascio di trappole e genera così poco calore”, spiegano i ricercatori . “I metalli sono efficienti convertitori di energia da energia a calore, quindi per migliorare la generazione di calore indotta dal laser nei robot leggeri polimerizzati, abbiamo incorporato un sottile strato metallico all’interno di ciascuno di essi usando la deposizione di vapore. A tale scopo, abbiamo depositato uno strato di adesione in titanio e uno strato dorato (rispettivamente di 1 e 5 nm di spessore) come un disco circolare all’interno del corpo di ciascun robot leggero. ”
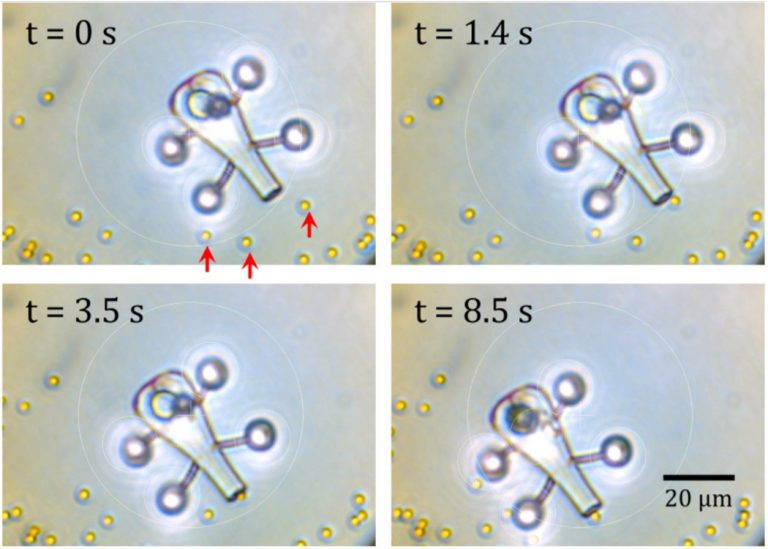
Una volta che i microbot vengono introdotti in una cuvetta per citometria, possono essere manovrati individualmente utilizzando quattro fasci controrivolanti che intrappolano ciascuna delle maniglie sferiche. Un raggio aggiuntivo viene utilizzato per il riscaldamento controllato dello strato metallico interno. Il riscaldamento laser forma una microbolla attorno alla quale vengono generate forti correnti di convezione. Le correnti di convezione possono disegnare minuscole perle di silice nella struttura.
“Combinando le correnti di convezione con la manipolazione ottica, ogni microrobot è in grado di raccogliere il carico in luoghi diversi”, proseguono i ricercatori. “L’effetto idrodinamico che viene utilizzato per spostare le particelle può essere abbastanza forte e, a differenza di trapping ottico e manipolazione, non fa affidamento sul contrasto dell’indice di rifrazione.”
Quelle perle di silice o altri carichi possono quindi essere rilasciati spostando il raggio di riscaldamento attraverso il corpo del microtool. Secondo i ricercatori, i microbot hanno un numero di potenziali applicazioni. Potrebbero essere utilizzati per il rilascio di farmaci in esperimenti a singola cellula o per fornire stimoli fisici e chimici a campioni biologici.
“Questo controllo non è limitato a un singolo robot e potrebbe potenzialmente essere esteso a un numero elevato di manipolatori utilizzando software avanzato (ad esempio robotica dello sciame), consentendo così ai microrobot di coordinarsi reciprocamente per svelare nuovi modi di interagire, sondare e acquisire informazioni (ad es. per la microbiologia 3D) “, concludono i ricercatori. “In definitiva, prevediamo che la robotica leggera porterà a schemi completamente nuovi e dirompenti per interazioni 3D in tempo reale con il mondo microscopico. Nel nostro lavoro futuro studieremo una gamma di applicazioni per la robotica leggera, in particolare quelle relative ai nanobiofotonici. ”