Rilevamento visivo dei difetti nella stampa 3D robotizzata
Nel recente ” Rilevamento visivo dei difetti superficiali basato sul confronto delle caratteristiche nella stampa 3D robotizzata “, i ricercatori cinesi del College of Mechanical Engineering dell’Università di Zhejiang (sia il laboratorio statale chiave per fluidi e sistemi meccatronici che la chiave Laboratorio del processo di stampa 3D e delle attrezzature della provincia di Zhejiang) approfondire le sfide della stampa 3D di robot, come individuare più chiaramente i difetti e modi per superarli.
Difetti, che vanno da problemi di qualità superficiale a problemi che causano il collasso completo, possono verificarsi in una varietà di casi, ma i ricercatori aggiungono che è fondamentale evitare tassi di rilevazione falsi ed essere in grado di distinguere i difetti rispetto alle caratteristiche delle parti. Con il rilevamento tempestivo, gli utenti possono correggere rapidamente i problemi, riducendo la quantità di materiale (e il tempo e gli sforzi) sprecati.
“Il rilevamento dei difetti è un campo di ricerca molto attivo. I metodi di rilevamento dei difetti esistenti possono essere suddivisi in due gruppi: sistemi di monitoraggio basati sulla visione artificiale e sistemi di monitoraggio basati sulla scansione laser “, hanno affermato i ricercatori. “Il primo utilizza principalmente le fotocamere per scattare foto, mentre il secondo può misurare l’altezza dell’oggetto, che non può essere raggiunto da un sistema monoculare basato sulla visione”.
Sia le tecniche tradizionali che i metodi di apprendimento profondo si basano su algoritmi di rilevazione dei difetti, con i ricercatori che si stanno sviluppando mentre si applicano ai loro campi specifici. Per la maggior parte delle opere già prodotte, gli scienziati si concentrano sulla ricerca di difetti che si trovano nella parte superiore delle parti realizzate tramite la stampa 3D FDM. I difetti compaiono spesso anche quando i livelli sono “irregolari”, dando merito al rilevamento della superficie esterna.
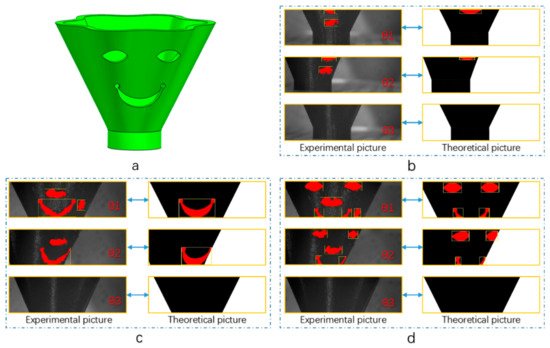
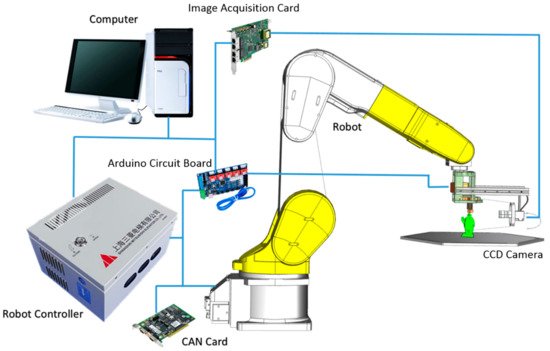
Per questo studio, il team di ricerca ha sviluppato un modo per separare i difetti dalle caratteristiche, confrontando i contorni di proiezione teorici e i contorni sperimentali dei prodotti. Il software principale utilizzato era Visual Studio 2015 e la stampante 3D robot era basata sul robot giapponese Mitsubishi RV-6SD 6-DOF, accompagnato dalla fotocamera e dal computer tedesco Basler acA1600-20gm.
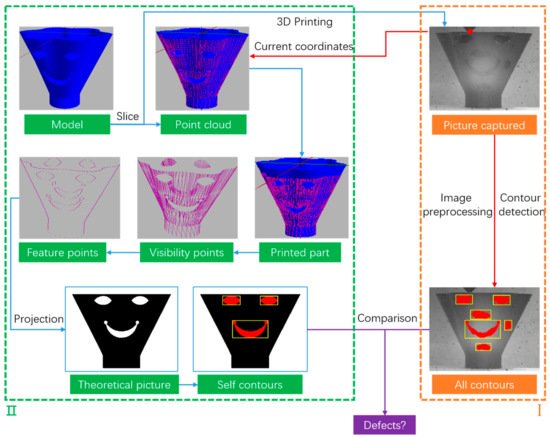
L’algoritmo per il rilevamento dei difetti è costituito da:
Fasi di elaborazione della stampa 3D
Rilevamento del contorno
Individuazione di difetti e caratteristiche proprie
La tecnologia di elaborazione delle immagini acquisisce dettagli dall’immagine proiettata e dall’immagine acquisita, mentre i difetti, nonché le caratteristiche, vengono rilevati mentre i parametri dei contorni nell’immagine vengono confrontati con il modello.
“Quando la somiglianza dei parametri tra il profilo precedente e uno di questi ultimi raggiunge una soglia, significa che il profilo è la sua caratteristica, non il difetto, e viceversa”, spiegano i ricercatori.
Il metodo di estrazione delle funzioni automatiche consente di evidenziare i punti visivi tramite le coordinate e la direzione della telecamera, con punti di proiezione proiettati su immagini teoriche, ottenendo immagini di funzionalità.
“Si noti che, in teoria, la dimensione minima dei difetti che il metodo è in grado di rilevare è di 8,5 pixel per 8,5 pixel e per quanto riguarda la dimensione fisica reale, deve essere convertita dai parametri della fotocamera e dalla distanza di rilevamento”, hanno concluso i ricercatori.
“Nei lavori futuri, il tempo di elaborazione dell’algoritmo proposto dovrebbe essere ulteriormente ridotto in modo da soddisfare la necessità di un rilevamento online in tempo reale. E per migliorare la robustezza del sistema di rilevamento, è necessario prendere in considerazione i materiali di stampa degli oggetti, gli ambienti sperimentali e le attrezzature. “

Estrazione delle caratteristiche: (a) Il processo specifico di estrazione delle caratteristiche; (b) Regole di estrazione di punti visivi e punti caratteristica nella direzione corrente della telecamera; (c) Giudizio in tre punti del punto caratteristico. Il processo di elaborazione delle parti nel sistema: I Rilevazione del contorno dal modello reale; II Rilevazione del profilo dal modello teorico.