Irlanda: i ricercatori creano una stampante 3D open source per la neurofisiologia
I ricercatori Thomas Campbell e James FX Jones, entrambi della School of Medicine, University College di Dublino, in Irlanda , hanno creato una nuova stampante 3D per il settore medico, descrivendo in dettaglio il loro lavoro nella recente pubblicazione ” Progettazione e realizzazione di un sistema modulare a basso costo , sistema di posizionamento XYZ adattabile e open source per neurofisiologia . “
Gli autori hanno creato un sistema open source che può essere personalizzato per una vasta gamma di progetti, basandosi su un sistema di posizionamento XYZ in grado di spostare un sensore o una sonda. Come una gru a cavalletto, questa nuova stampante FDM è gestita da uno standard Raspberry Pi 3, Arduino Mega, schermo motore RAMPS 1.4 e motori passo-passo bipolari NEMA17. Il telaio è realizzato in estruso di alluminio 20 × 20 mm realizzato con parti stampate in 3D, fissate insieme da staffe. Il “costo di entrata” per una simile stampante 3D è stato calcolato a circa $ 670,20.
Con l’integrazione di Raspberry Pi 3, gli autori sono stati anche in grado di incorporare la Open Computer Vision Library (OpenCV) affermando che la caratteristica è ciò che rende il sistema unico rispetto ad altri sistemi di posizionamento XYZ. La libreria di software di apprendimento automatico open source viene utilizzata con movimento automatizzato e i creatori si aspettano che trasformi l’esplorazione della meccanotrasduzione, il metodo per i neuroni sensoriali di trasformare uno stimolo meccanico in un segnale elettrico.
Il movimento della stampante 3D è controllato da Arduino Mega, che a sua volta è controllato da Raspberry Pi 3:
“La disposizione dei microcontrollori in questa configurazione master-slave consente l’automazione di paradigmi di movimento complessi attraverso il linguaggio di programmazione Python3. La fonte di alimentazione del sistema dipende dal caso d’uso previsto. Per la neurofisiologia è necessario utilizzare un alimentatore lineare regolato a 12 V CC per garantire bassa EMI, tuttavia, per altre applicazioni è sufficiente un alimentatore a commutazione 12 V CC. “
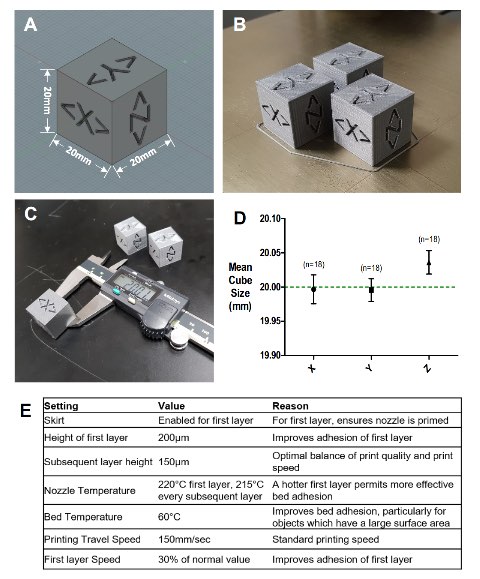
Campbell e Jones hanno scelto il PLA per la stampa dei componenti dei materiali, utilizzando una Prusa i3 MK3 , modellando il cubo di calibrazione in Autodesk Fusion360 e affermando che le dimensioni di ciascun cubo sono state misurate con calibri digitali sei volte. Non erano necessari supporti per nessuna delle parti fabbricate, tutte progettate con sporgenza minima.
Le istruzioni di costruzione includono:
Gruppo carrello asse Y.
Assemblaggio assi X e Z.
Allineamento degli assi
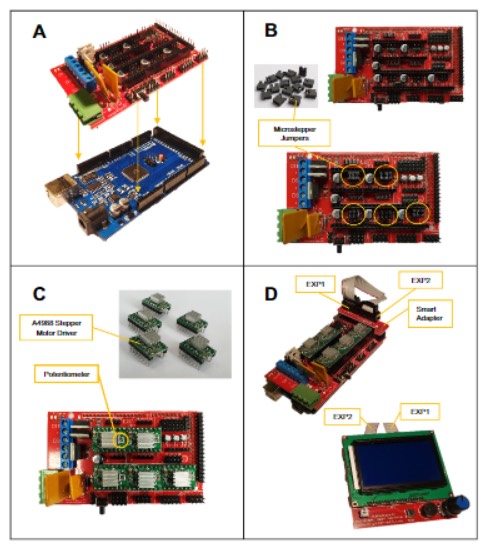
Elettronica e cablaggio
Preparazione e caricamento del firmware Marlin
Installazione di Raspberry Pi 3 e OpenCV
Creazione di un sistema operativo basato su terminali
Per l’uso in applicazioni di neurofisiologia funzionale, gli autori hanno testato la macchina per vedere se era in grado di stimolare la meccanotrasduzione all’interno del fuso muscolare. Le soglie di attivazione sono state mostrate correttamente per:
Allungare la distanza
Velocità di stiramento
Accelerazione di stiramento
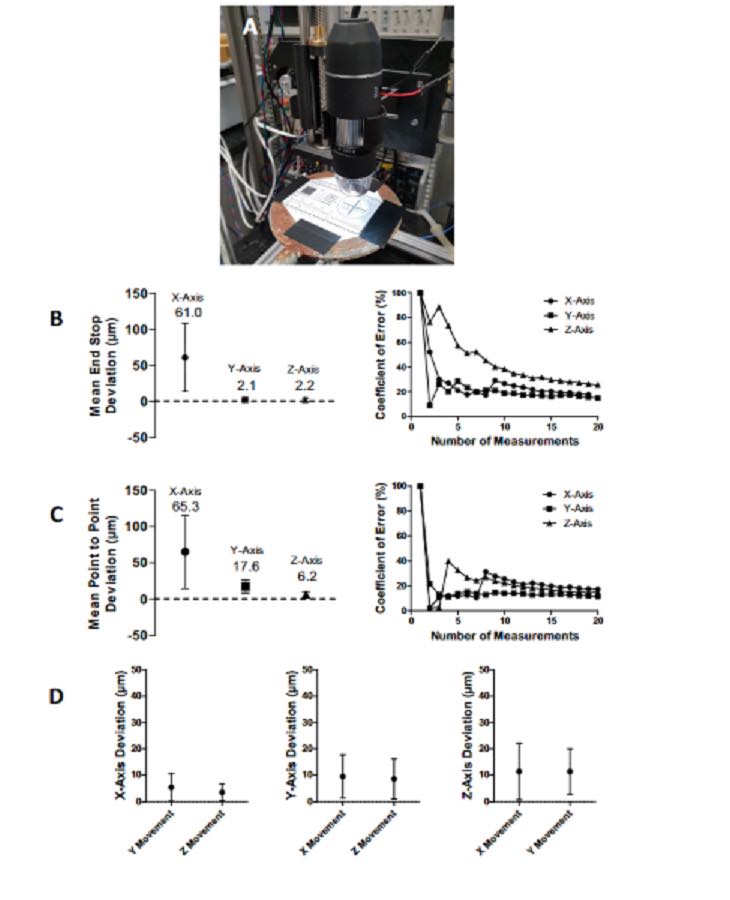
“I principali limiti del sistema di posizionamento XYZ sono di natura meccanica”, hanno concluso gli autori. “Nella nostra implementazione, il gruppo degli assi X e Z è alto e pesante e come tale abbiamo optato per ridurre la velocità di spostamento degli assi Y e Z a 2 mm x 1 e 5 mm x 1 in modo rispettivo. Questa riduzione della velocità preserva l’integrità posizionale del sistema riducendo la probabilità che i motori passo-passo avanzino erroneamente. Tuttavia, il gruppo può essere regolato in base al caso d’uso specifico desiderato e una semplice riduzione della dimensione dell’asse Z ridurrebbe notevolmente la sua inerzia e consentirebbe l’accuratezza della posizione a velocità di spostamento maggiori.
“Tutti i componenti e il software utilizzati erano open source, liberi di accedere o disponibili a basso costo. Data la facilità con cui è possibile accedere a questi componenti e il potenziale offerto da un tale sistema, si ritiene che altri gruppi di ricerca possano trovare questo sistema uno strumento sperimentale attraente e utile. “
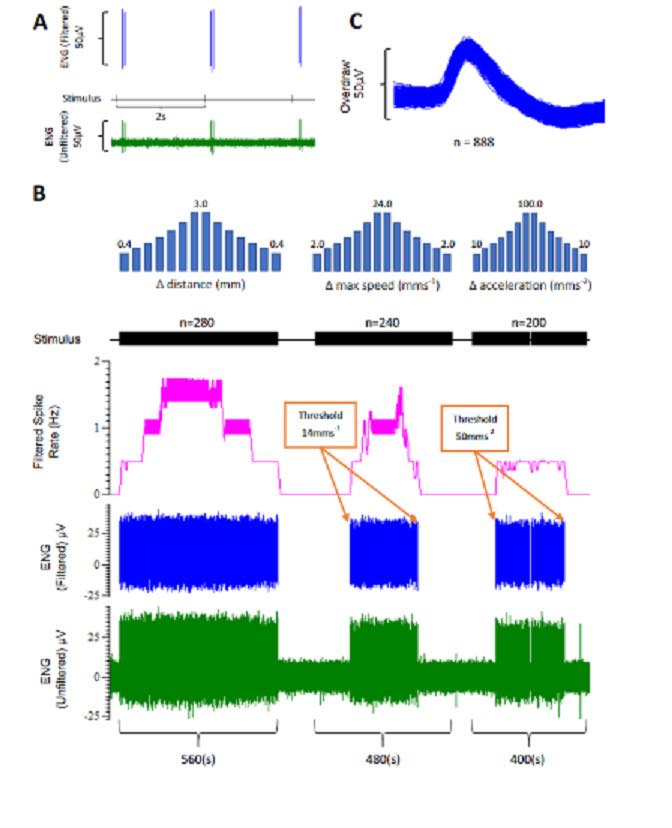
Allungando il fuso muscolare per studiare la meccanotrasduzione. (A) Attività nervosa afferente da un fuso muscolare allungato. Brevi impulsi di allungamento venivano applicati al corpo lombare ogni due secondi al fine di stimolare la meccanotrasduzione dal fuso muscolare. Ogni impulso di stimolo indica l’inizio di un allungamento. L’attività nervosa filtrata è rappresentata in blu, non filtrata in verde. (B) Le soglie di attivazione della meccanotrasduzione sono state valutate con incrementi graduali della distanza di allungamento, della velocità o dell’accelerazione. Per questa unità filtrata, sono state osservate soglie di attivazione a 14,0 mm x 1 e 50 mm x 2. Aumento della distanza di stiramento, velocità o accelerazione sono associati all’aumentata attività nervosa (Filtered Spike Rate). (C) Il superamento dell’attività nervosa filtrata osservata in (B) indica che si trattava di una registrazione a unità singola. Tutti i dati sono stati registrati in Spike2 (Cambridge Electronic Design). ENG, elettroneurogramma. (Per l’interpretazione dei riferimenti al colore in questa legenda delle figure, il lettore si riferisce alla versione web di questo articolo.) 18T. Campbell, JFX Jones / HardwareX 7 (2020) e00098.