Il sensore tattile ottico stampato in 3d vince il primo premio al concorso annuale 2016 di soft robot
 TacTip, un sensore tattile ottico stampata in 3d e sviluppato da alcuni ricercatori presso l’Università di Bristol nel Regno Unito, ha vinto il primo premio del soft Robotics Competition 2016 nella categoria soft Robotics Research. I sensori potrebbero fornire ai robot del futuro una destrezza simile a quella umana.
TacTip, un sensore tattile ottico stampata in 3d e sviluppato da alcuni ricercatori presso l’Università di Bristol nel Regno Unito, ha vinto il primo premio del soft Robotics Competition 2016 nella categoria soft Robotics Research. I sensori potrebbero fornire ai robot del futuro una destrezza simile a quella umana.
Creata per ispirare i ricercatori e gli studenti che utilizzano il soft Robotics Toolkit open source, il concorso si svolge oramai da tre anni, e i tre vincitori della dizione 2016 sono stati annunciati questa settimana. Il progetto più rilevante per i nostri interessi è stata quella di Bristol Robotics Laboratory del Regno Unito, la cui squadra ha vinto il primo premio nella categoria I contributi in morbida Robotics Research. La loro creazione, un sensore tattile ottico stampato in 3d chiamato “TacTip,” è stato sviluppato per oltre sette anni.
Secondo i ricercatori di Bristol, le funzioni del TacTip , permette alla punta delle dita artificiali d’essere adattati a determinate applicazioni e stampate con il minimo di difficoltà. I sensori possono essere montati su braccia o mani robot, e potrebbero fornire ai robot una destrezza simile a quella umana. “E ‘bello sapere che al progetto TacTip viene riconosciuta la potenzialità di esplorare le applicazioni di rilevamento tattile all’interno della robotica soft”, ha detto Nathan Lepora, team leader del progetto e docente di robotica e neuroscienze computazionali presso l’Università di Bristol.
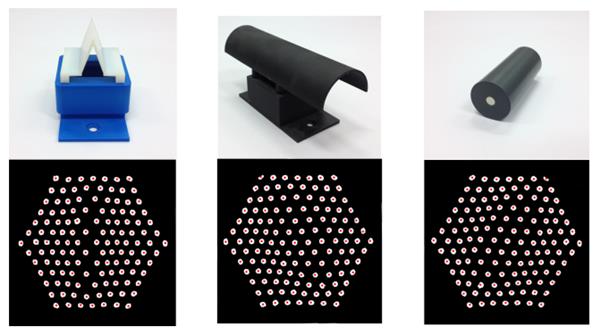
Per creare il suo dito sensore stampato in 3d, la squadra del Bristol Robotics ha dovuto progettare con attenzione il proprio dispositivo, mentre anche avendo cura di scegliere il materiale più adatto. Alla fine, hanno scelto i filamenti Tango Nero + e VeroWhite 3D di Stratasys, riempiendo il tutto con un gel di silicone chiaro dopo la stampa. L’interno della punta si compone di una serie di perni bianchi a punta geometricamente disposti che si deformano quando un oggetto viene a contatto, e sono monitorati tramite la webcam Microsoft LifeCam Cinema . Diversi modelli di spostamento del perno possono, secondo i ricercatori, fornire informazioni sulla forma dell’oggetto, la localizzazione degli oggetti stessi, la forza di contatto, la coppia, e il taglio.
La stampa è avvenuta su una Stratasys Fortus 450mc, mentre hanno usato anche un taglio laser, un saldatore, e altri strumenti, per la fabbricazione del sensore. I ricercatori di Bristol oltre ad avere ottenuto il primo premio al Concorso Soft Robotics , assumono ora anche un approccio commerciale al loro lavoro: Il TacTip è disponibile su ordinazione per e-mail, oppure può essere fabbricato seguendo le istruzioni on-line.
Altri vincitori del soft Robotics Competition 2016 sono stati una squadra del Worcester Polytechnic Institute (WPI), che ha ottenuto il primo premio per la sua Manta Ray Robot bio ispirata. Nella categoria College Robotics, e medie superiori hanno vinto Aidan Leitch e Harrison Young, che hanno primeggiato nella loro categoria di età rispettivamente con un sensore pneumatico a deformazione e un movimento controllato robotico in un tessuto rinforzato . L’edizione 2017 del concorso è ora aperta per le iscrizioni.