Stampa 3D utilizzata per sviluppare il sensore tattile
I sensori tattili sono utilizzati nello sviluppo di robotica, computer e sistemi di sicurezza. Sono spesso usati nei touchscreen, così come per imitare il senso del tatto umano per i robot. In un documento intitolato ” Progettazione e sviluppo di un sensore tattile con stampa 3D basato su polimero conduttivo con struttura a molla di tipo quadrato “, un gruppo di ricercatori descrive la creazione di un sensore tattile mediante la stampa 3D.
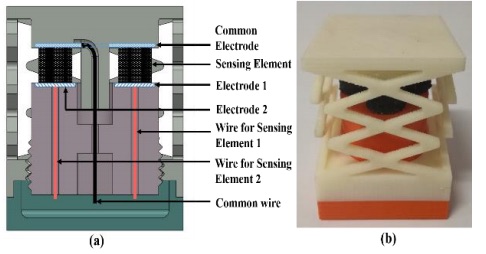 I sensori tattili piezoresistivi a base di polimeri conduttivi consentono una qualità flessibile che è presente nella pelle umana; tuttavia, secondo i ricercatori, la maggior parte di questi senatori tattili non è in grado di identificare più di due parametri simultaneamente. Nello studio, i ricercatori hanno progettato, sviluppato e testato un sensore tattile con dimensioni di 50 x 50 × 56 mm basato su un array di elementi di rilevamento a base polimerica conduttivo 2 × 2 incorporato in una struttura a molla di tipo quadrato. Questa struttura primaverile è stata prodotta utilizzando la stampa 3D.
I sensori tattili piezoresistivi a base di polimeri conduttivi consentono una qualità flessibile che è presente nella pelle umana; tuttavia, secondo i ricercatori, la maggior parte di questi senatori tattili non è in grado di identificare più di due parametri simultaneamente. Nello studio, i ricercatori hanno progettato, sviluppato e testato un sensore tattile con dimensioni di 50 x 50 × 56 mm basato su un array di elementi di rilevamento a base polimerica conduttivo 2 × 2 incorporato in una struttura a molla di tipo quadrato. Questa struttura primaverile è stata prodotta utilizzando la stampa 3D.
L’elemento sensibile è stato sviluppato per essere altamente personalizzabile. Il materiale di base del sensore è la gomma siliconica che presenta miglioramenti di silice e nero di carbonio, con Silane come agente di accoppiamento.
“La struttura della molla riportata in questo documento è stata progettata per il dimensionamento della forza e analizzata numericamente con COMSOL Multiphysics prima della fabbricazione”, affermano i ricercatori. “Il circuito per elettrodi incorporati è stato anche sviluppato in questa ricerca con una comunicazione wireless tra il gruppo sensore e l’interfaccia utente sviluppata che consente di utilizzare il sensore come dispositivo plug and play.”
Con i sensori di forza, è necessario definire un intervallo di lavoro. Il controllo del campo di lavoro può essere effettuato sorvegliando la deflessione applicata all’elemento sensibile. Introducendo una struttura a molla di tipo quadrato esterno agli elementi di rilevamento, il campo di lavoro può essere facilmente modificato. La struttura a molla è progettata per facilitare una matrice 2 x 2 di elementi di rilevamento e progettata per tre parti separate.
Una forma a dente di sega a due strati è stata sviluppata in un’unica molla di tipo quadrato, che è stata stampata in 3D utilizzando ABS Plus. La fabbricazione del sensore stesso è stata effettuata in due fasi: la fabbricazione dell’elemento sensibile e quindi la struttura di rilevamento. L’elemento sensibile è stato realizzato principalmente con gomma siliconica a temperatura ambiente (RTV). Per creare l’elemento sensibile è stato utilizzato un metodo di stampaggio meccanico, con lo stampo progettato in tre strati per facilitare la rimozione dell’elemento sensibile.
“Lo stampo è in grado di sviluppare elementi sensibili con diverse geometrie e con diversi spessori in un unico lotto di produzione”, spiegano i ricercatori. “Una caratteristica chiave di questo processo di produzione è che gli elementi sensibili possono essere sviluppati in base alla geometria e alle dimensioni richieste con diversi livelli di prestazioni”.
Tre parti in totale sono state stampate in 3D; la struttura a molla di tipo quadrato era stampata in ABS con riempimento al 100% mentre le altre due parti, il pad inferiore e il supporto interno, erano stampate con PLA con riempimento al 75%. L’elemento sensibile è stato quindi testato utilizzando un test di carico statico.
“Questa struttura a molla di tipo quadrato riduce al minimo la deflessione dell’elemento sensibile mentre consente l’espansione nella gamma operativa”, concludono i ricercatori. “Questo sensore è stato progettato per superare i problemi inerenti agli elementi di rilevamento basati su polimeri conduttivi utilizzando un circuito interno di condizionamento del segnale.”