Ricercatori australiani che stampano sensori tattili in 3D con compositi in TPU e PLA
Nel recente pubblicato ” Un sensore tattile stampato ad ultrasuoni 3D per la robotica leggera”, i ricercatori australiani Saeb Mousavi, David Howard, Chun Wang e Shuying Wu creano un nuovo metodo per la produzione di sensori tattili piezo-resistivi per la robotica leggera, utilizzando la stampa 3D FDM con poliuretano termoplastico (TPU) e composito acido polilattico-grafene (PLA-G).
La fabbricazione di sensori tattili tramite la stampa 3D sta ricevendo sempre più attenzione a causa dei vantaggi offerti: dalla maggiore accessibilità complessiva alla maggiore velocità di produzione e dalla capacità di utilizzare più materiali, incluso il grafene. A causa della “superficie superiore” e dell’alta conducibilità, il grafene mostra una grande promessa come materiale per il rilevamento tattile. I materiali termoplastici sono accessibili e convenienti e facili da stampare. Non è richiesta la post-elaborazione e si verifica un legame più forte per le reti integrate a causa della maggiore durezza della grafite.
Per questo studio, i ricercatori hanno utilizzato l’acido polilattico grafene (PLA-G) composito polimerico conduttivo (CPC) come materiale di rilevamento piezoresistivo per i sensori tattili di stampa 3D. Hanno stampato in 3D un sensore estensibile, testando le prestazioni valutando l’angolo di piega e l’ampio intervallo di pressione. Mentre il campione creato dai ricercatori per questo studio era di base, mostra la promessa per la capacità di stampare in 3D e utilizzare geometrie più complesse in seguito poiché il materiale è sensibile alle differenze di pressione e flessione.
“La capacità di integrare materiali strutturali e di rilevamento in una parte stampata offre numerosi vantaggi e aggira alcune delle limitazioni dei metodi di fabbricazione convenzionali”, affermano i ricercatori. “Questo sensore può essere facilmente integrato o collegato ad attuatori robotici morbidi per l’acquisizione di informazioni tattili.”
Poiché il PLA non è flessibile, hanno creato il composito PLA-G per funzionare come uno strato inserito tra il TPU (qui, il team di ricerca ha utilizzato Ninjaflex ), senza notare alcun “debonding”.
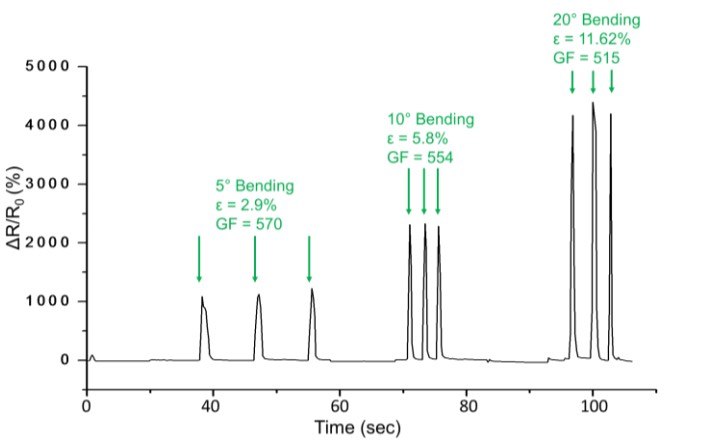
“Il sensore è stato incollato a due estremità su una cerniera in alluminio per testare la sua sensibilità alla flessione limitata. Durante ogni esperimento, la cerniera è stata piegata in una certa misura e è tornata rapidamente al suo stato originale “, hanno spiegato i ricercatori. “Misurando la lunghezza iniziale del misuratore e il raggio di curvatura, è stata calcolata la deformazione corrispondente (ε) indotta nel sensore per ciascun angolo di curvatura (ε = ΔL / L0) e successivamente è stato calcolato il fattore di gauge (GF) (GF = (ΔR / R0) / ε) “.
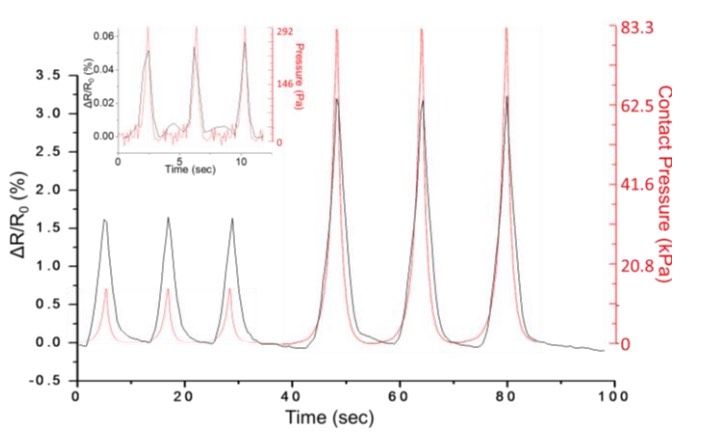
I ricercatori hanno utilizzato una cella di carico per applicare la pressione di contatto sul sensore mentre hanno valutato la sua capacità di rilevare la pressione. Durante gli esperimenti sono state utilizzate tre diverse pressioni applicate.
“I filamenti termoplastici facilitano il processo, poiché non è richiesta alcuna vulcanizzazione o post-elaborazione. Inoltre, questo sensore può essere stampato o fissato su qualsiasi superficie (ad es. Su attuatori morbidi) e può fornire un feedback tattile accurato e affidabile. La capacità di rilevare la pressione di contatto e l’angolo di flessione è cruciale per un attuatore morbido e questo sensore si è rivelato un ottimo candidato per sviluppare tali attuatori robotici in futuro “, hanno concluso i ricercatori.