Metamateriali “muscoli e ossa” nello stesso pezzo: come un solo polimero diventa tronco, tendini e tibie di un robot
Il cuore del lavoro: Topology Regulation + Superposition Programming
Un gruppo del CREATE Lab dell’EPFL (Josie Hughes, Qinghua Guan e colleghi) ha messo a punto un metodo per programmare rigidità e anisotropia all’interno di un’unica struttura reticolare stampata con un solo materiale. La chiave è l’accoppiata tra Topology Regulation (TR), che fonde in modo continuo due geometrie di cella (body‑centered cubic, bcc, e X‑Cube), e Superposition Programming (SP), che sovrappone e orienta più celle nello stesso volume. In questo modo il ventaglio di configurazioni arriva a oltre un milione (quattro milioni quando si superpongono quattro celle, più di 75 milioni con cinque), senza cambiare resina.
Numeri alla mano: dalla pelle alla cartilagine in 3D
Con le sole variazioni geometriche, il team ha coperto un intervallo di modulo elastico (Young) di 20–280 kPa e di modulo di taglio di 1,38–40 kPa. È una finestra che consente di imitare tessuti molli e regioni pseudo‑osse nel corpo del robot, pur restando lontani dai 30 GPa tipici dell’osso compatto.
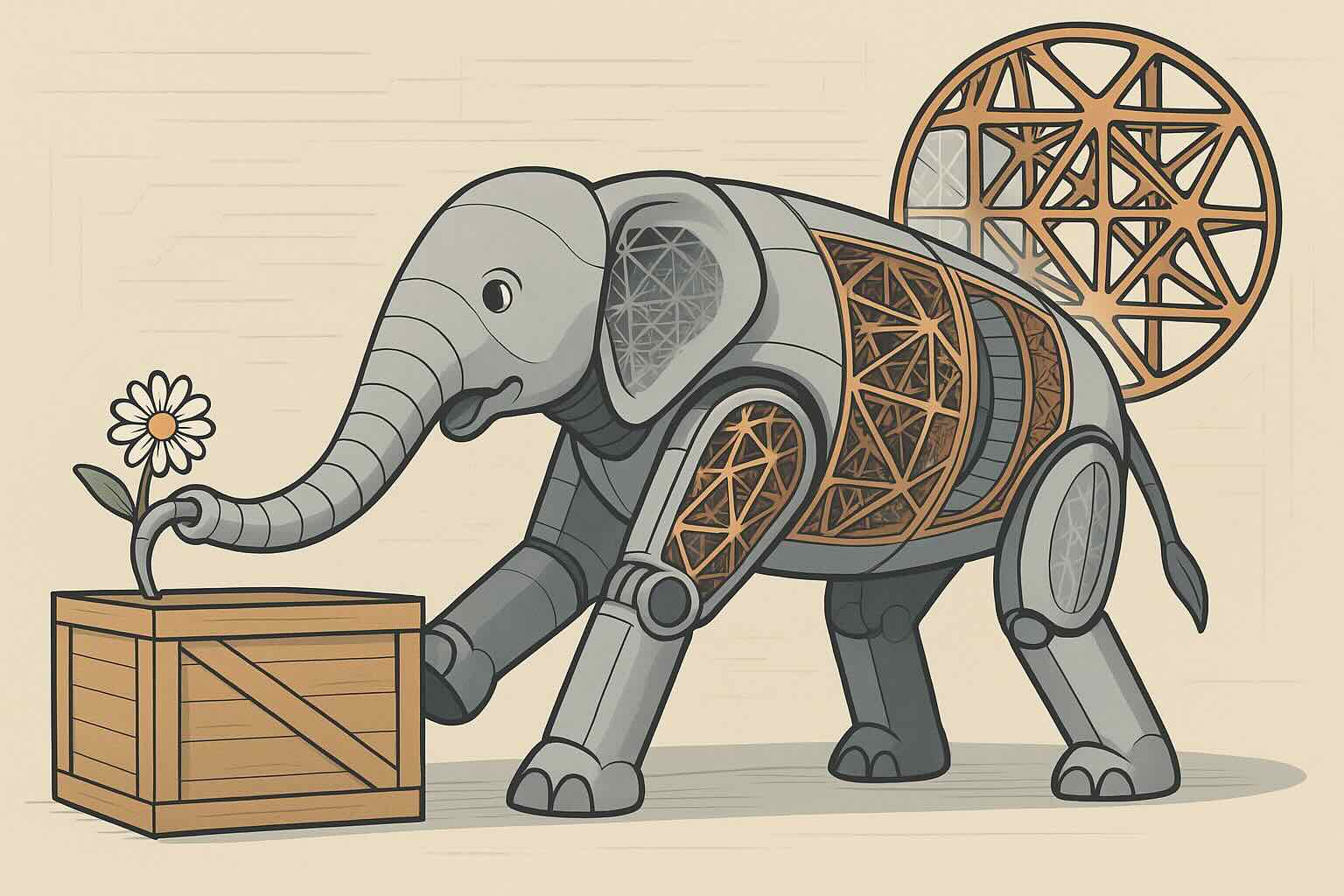
L’elefante monopezzo: cosa c’è dentro
Il prototipo è un elefante stampato in un solo blocco: tronco continuo e flessibile, anche con torsione elicoidale; zampe con giunti “ossei” che portano il carico; piedi con zone anteriori rigide e talloni più soffici. L’intero corpo pesa circa 3,89 kg, può reggere 4 kg addizionali e il tronco solleva 500 g, tre volte il suo peso. L’attuazione avviene con quattro motori e cavi tipo Bowden; le sezioni del tronco sono comandate in sequenza per afferrare oggetti da 0,1 a 100 mm.
Catena digitale e attrezzatura: chi fa cosa
-
Stampa: Halot‑Mage Pro di Creality 3D Technology Co. Ltd.
-
Materiale: resina elastica F80 di Godsaid Technology Co. Ltd.
-
Motori: servocomandi Dynamixel serie XC330 (modelli XC330‑M188 e XL330‑M288) di ROBOTIS.
-
Software/Toolchain: generazione geometrie in MATLAB, esportazione automatica in OpenSCAD, generazione STL via Hob3l.
Come si “programmano” le proprietà
-
Definizione del campo TI (Topology Index): un parametro 0–1 che regola il passaggio da bcc (0) a X‑Cube (1).
-
SP (DSP/TSP): indici direzionali e traslazionali per ruotare/traslare celle; la sovrapposizione crea nuovi mattoni con doti meccaniche personalizzate.
-
Ottimizzazione: combinazione di metodi multi‑obiettivo e algoritmi genetici per scegliere dove mettere “ossa” e dove “muscoli”.
Perché un’unica resina e non multimateriale
La stampa multimateriale introduce salti bruschi di proprietà e un numero limitato di combinazioni. Qui il gradiente è continuo (TR) o discretizzato a blocchi (SP), con controllo fine dell’anisotropia. Si evitano interfacce deboli tipiche dei layer “rigido/soft” e si riducono tempi e costi di fabbricazione.
Limiti dichiarati
-
Oltre 280 kPa non si arriva: per simulare l’osso vero servirebbero geometrie più spinte o materiali più rigidi.
-
Lattice ≠ tessuto omogeneo: la “schiuma” introduce discontinuità rispetto a muscoli e ossa reali.
-
La progettazione richiede strumenti numerici (FEA + data‑driven) per gestire stabilità e large deformation.
Spazio per sensori e fluidi
La struttura a celle aperte è impermeabile alla galvanica ma permeabile ai fluidi: il robot può operare in acqua. L’architettura a nido d’ape consente di inglobare sensori, conduttori o ulteriori materiali senza riprogettare tutto.
Applicazioni plausibili (oltre l’elefante)
-
Protesi leggere con giunti “programmati” per camminata e presa.
-
Soft‑gripper per alimenti, con dita a rigidità graduata.
-
Droni bio‑ispirati con armi di manovra stampate in situ, più robuste dei gusci monomateriale.
-
End‑effector per cobot alimentari o farmaceutici, dove compliance e igienicità contano più della forza bruta. (Inferenza basata sulle proprietà riportate e sui settori della soft robotics).
Cosa osservare nei prossimi passi
-
Aumento dello spettro di moduli tramite spessori variabili o resine più rigide/morbide.
-
Librerie open‑source di celle “pronte” (bcc, X‑Cube, Kelvin, ecc.) da combinare con TR/SP.
-
Strumenti CAD “guidati” dove l’ingegnere imposta il profilo di deformazione desiderato e il software genera il campo TI/SP.
