I ricercatori TU Delft creano robotica morbida che risponde ai sensori basati sul colore
Mentre la stampa 3D e la robotica continuano a scontrarsi e completarsi a vicenda, vengono create nuove macchine. Nella robotica leggera, stiamo assistendo alla nascita di una classe di macchine che possono deformarsi o trasformarsi in risposta ai loro ambienti.
Rob Scharff, un dottorando presso TU Delft , discute di più su come questi robot sono in grado di cambiare colore tramite sensori e forma, spostandosi ulteriormente verso il controllo a circuito chiuso di robot morbidi, con ulteriori ricerche pubblicate su ” Proprioception basato sul colore che interagisce con gli attuatori con oggetti “. I ricercatori spiegano il loro obiettivo di creare robot soft in grado di interagire con oggetti che prima erano sconosciuti, utilizzando sensori a colori.
“I nostri risultati dimostrano che le deformazioni dell’attuatore durante l’interazione, comprese le forme sigmoidali, possono essere accuratamente ricostruite. L’accurato rilevamento della forma rappresenta un passo significativo verso il controllo a circuito chiuso di robot soft in ambienti non strutturati ”, affermano i ricercatori.
Scharff spiega la robotica leggera come il robot più morbido e adattivo di oggi, oltre a sottolineare che i loro dispositivi di presa sono diventati molto più in sintonia con la manipolazione di articoli come frutta o verdura, ad esempio, rendendoli utili per settori come i negozi di alimentari o i loro magazzini — e in esercizi in cui gli oggetti che stanno afferrando potrebbero essere imprevedibili per dimensioni o fragilità.
Perché non possiamo usare i sensori tradizionali nei robot soft?
“I robot tradizionali in genere hanno giunti che ruotano attorno a un singolo asse”, afferma Scharff. “Pertanto, un singolo encoder in ciascun giunto è sufficiente per ricostruire la forma del robot. Al contrario, i robot soft possono piegarsi, allungarsi e torcersi contemporaneamente, rendendo inadatti i sensori esistenti. Pertanto, abbiamo bisogno di sensori in grado di catturare una grande varietà di deformazioni. Inoltre, i sensori devono essere flessibili in modo da non ostacolare il movimento degli attuatori. “
Come funzionano i tuoi sensori?
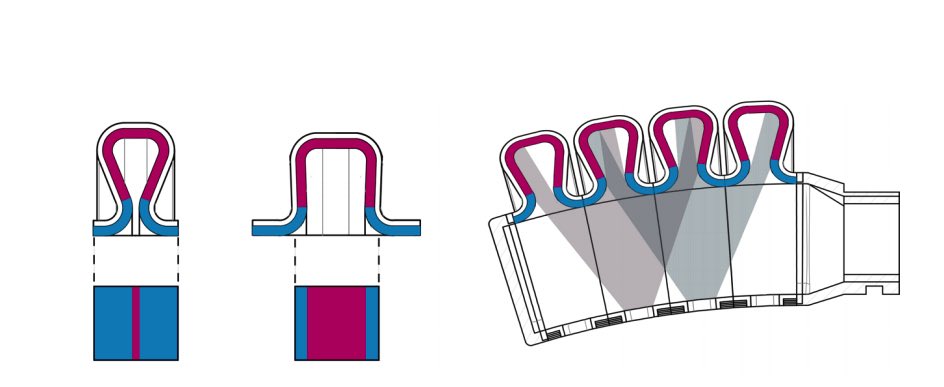
“Gli attuatori di piegatura mostrati in questa ricerca consistono in una camera d’aria con uno strato inestensibile nella parte inferiore e una forma a soffietto estensibile nella parte superiore. Il gonfiaggio della camera d’aria provoca l’espansione del soffietto in alto, mentre il fondo rimane alla stessa lunghezza, creando un movimento flettente. Stampiamo in 3D un motivo a colori all’interno di questi soffietti superiori e osserviamo questi motivi a colori con sensori di colore nella parte inferiore estensibile dell’attuatore. Quando l’attuatore viene gonfiato, iniziano a comparire i colori precedentemente occlusi dai sensori. Usiamo questo cambiamento di colore e i cambiamenti dell’intensità della luce per prevedere la forma dell’attuatore. “
Come si ricava la posizione da questo colore?
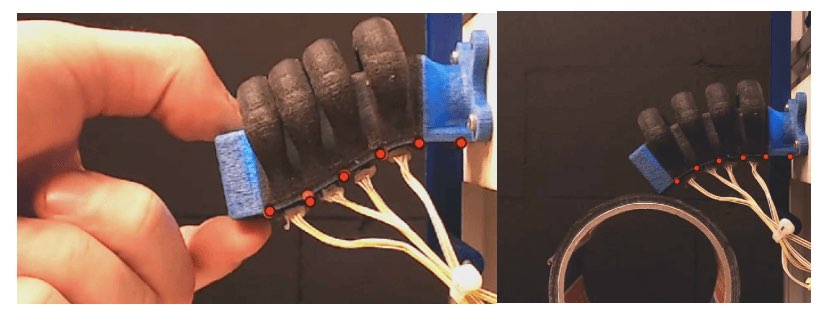
“Calibriamo i sensori utilizzando una rete neurale feedforward. Per addestrare la rete, abbiamo raccolto 1000 campioni di valori del sensore con le corrispondenti forme di attuatore. Le forme dell’attuatore erano rappresentate da 6 marcatori sullo strato inestensibile che erano tracciati da una telecamera. Gli ingressi della rete sono le letture di 4 sensori di colore con 4 canali (rosso, verde, blu, bianco) ciascuno. “
Qual è l’accuratezza del tuo nuovo metodo?
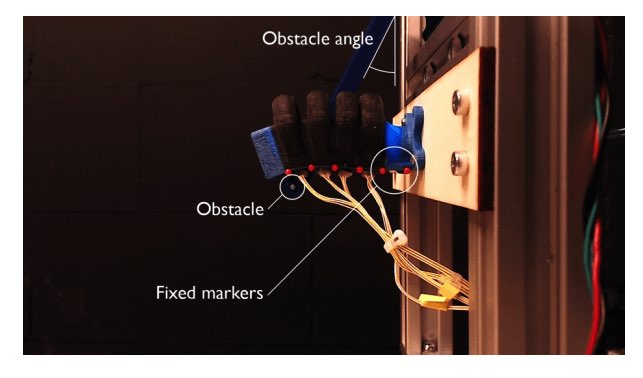
“Il nostro metodo è in grado di prevedere la posizione di ciascuno dei marker con un errore che è generalmente compreso tra 0,025 e 0,075 mm. Il nostro metodo funziona anche su casi di carico che non erano presenti nei dati di addestramento. A differenza dei sensori esistenti nella robotica leggera, possiamo misurare la forma esatta di come viene piegata la pinza attorno a un oggetto. Pertanto, il lavoro è un grande passo verso la capacità di spostare e afferrare con precisione gli oggetti con robot morbidi. “
Come vengono fabbricati gli attuatori?
“Gli attuatori sono fabbricati in un unico pezzo utilizzando la produzione additiva multi-materiale PolyJet. I soffietti sono fabbricati utilizzando il materiale flessibile Agilus Black, mentre la struttura colorata è composta da segmenti alternati di VeroCyan e VeroMagenta. I PCB del sensore personalizzato sono incorporati su piccoli tappi stampati 3D che sono inseriti nella parte inferiore dell’attuatore per creare un accoppiamento ermetico. I sensori di colore sono molto economici e accessibili, il che rende facile implementare la tecnica anche in altri robot soft.