Quebec: nuovo framework per la stampa 3D Soft Robotics
” Simulazione geometrica e produzione additiva di robot morbidi multi-materiale” è una recente tesi di laurea di Christopher-Denny Matte, uno studente dell’Università Concordia (Gina Cody School of Engineering and Computer Science Mechanical, Industrial and Aerospace Engineering) di Montreal, Quebec. Matte esplora il tema della soft robotica, compresa la necessità di versatilità nella progettazione e simulazione.
La robotica leggera è diventata più accessibile agli scienziati e ai ricercatori degli studenti oggi poiché sono stati fatti molti passi avanti sul campo, offrendo robot a grandezza naturale, in grado di esplorare su diversi livelli e che possono anche essere migliorati con la bionica.
“I progetti più comuni per robot morbidi sono realizzati mediante attuazione distribuita su materiali morbidi. Con più Grado di libertà (DoF) di quello che i robot rigidi possono fornire, può completare meglio compiti altamente abili come la comprensione e il rilevamento di aree confinate ”, afferma Matte. “I robot soft hanno la proprietà unica che la loro intera deformazione e il loro caso d’uso si basano sulla sua forma e distribuzione del materiale. Pertanto, essere in grado di programmare le deformazioni modificandone la geometria o posizionando determinati materiali in posizioni chiave è una prospettiva molto interessante. “
L’autore sottolinea inoltre la necessità di diverse aree di ricerca, tra cui:
Nuovi metodi di simulazione per una riproduzione efficiente
Tecniche di fabbricazione estese
Miglioramenti nella simulazione numerica e nei predittori

Dopo aver esaminato ogni forma di stampa 3D, Matte ha scelto l’elaborazione della luce digitale (DLP) utilizzando un sistema di archiviazione e recupero automatico (ASRS) con un approccio di pulizia attivo. In questo studio, sottolinea che si prefiggeva di risolvere anche problemi nella stampa DLP, come ad esempio:
Contaminazione tra materiali
Tempo di scambio materiale lungo
Capacità materiale limitata
Matte è stato ispirato da ricerche precedenti che utilizzavano algoritmi basati sulla geometria per l’ottimizzazione, espandendo i concetti alla robotica leggera e materiali multipli per l’uso nella stampa SLA / DLP; infatti, l’uso di più materiali all’interno della robotica (con le mani antropomorfe, per esempio) sta diventando più comune, offrendo “conformità e prestazioni uniche” di elementi critici come giunti e attuatori.
“Dai prototipi ai prodotti finali, si può vedere che la tecnologia viene applicata a vari campi, dagli organi alle parti degli aerei”, afferma Matte.
La stampa multi-materiale per SLA / DLP è comunque relativamente limitata, generalmente causando un rallentamento della produzione o sfide nel cambio dei materiali.
“Per realizzare il framework, è necessario esaminare tre domande di ricerca: 1) Come convertire l’analisi meccanica in un problema geometrico, 2) Come applicare diverse attuazioni nella simulazione e 3) Come modellare geometricamente le proprietà del materiale” afferma Matte.
A queste domande si risponde con 1) ottimizzazione geometrica, 2) modellazione mediante un tipo di elemento per vincoli geometrici, 3) un metodo di calibrazione per comprendere la connessione tra materiali e parametri di forma. Matte ha scoperto che il nuovo framework ha offerto risultati migliori in termini di precisione, insieme all’uso di più materiali.
Per questo studio, la struttura è orientata attorno a robot soft a cavo e pneumatici, ma Matte spiega che in futuro la struttura può essere perfezionata per altre attuazioni. In termini di stampa 3D, ci sono ancora ulteriori miglioramenti da apportare.
“DLP ha presentato una serie di sfide quali la contaminazione tra materiali, il processo di scambio poiché è necessario sostituire le vasche complete, nonché il numero di materiali per stampa e il tempo di gestione per la gestione di più materiali. Il problema con la contaminazione è stato risolto utilizzando un approccio di pulizia più attivo utilizzando getti di detergente “, ha concluso Matte. “Mentre lo scambio di materiali e la perdita di tempo intrinseca sono stati risolti adattando i sistemi di archiviazione e recupero automatizzati classici a una stampante DLP, ciò ha comportato un aumento della velocità di 3 volte per l’intero sistema, mentre si trattava di un’area di stampa 12 volte più grande della soluzioni precedenti. “
“L’ulteriore sviluppo del metodo DLP e la creazione di nuovi materiali consentiranno progetti illimitati e una riproduzione accurata del modello digitale. A causa di ciò, l’innovazione può continuare in termini di robot esplorativi in grado di gestire più situazioni, protesi più realistiche e complesse, nonché la conformità programmata meccanicamente per compiti abili. “
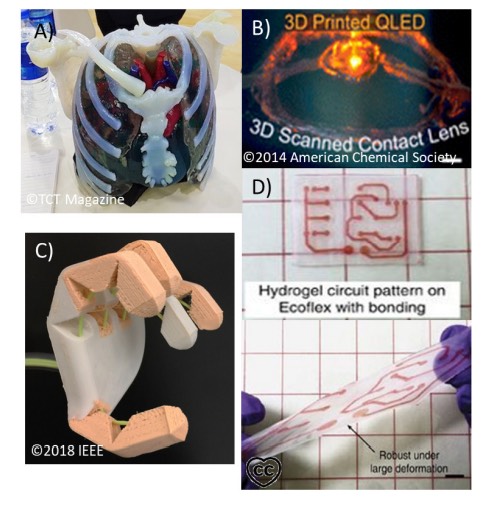
Applicazioni multi-materiale: A) Gabbia toracica fisiologicamente accurata [1]. B) Quantum Dot-LED stampato in 3D. Ristampato con il permesso di [2]. C) Una mano robotica morbida. Ristampato, con il permesso, da [3]. D) Un circuito idrogel ed Ecoflex conduttivo. CC di 4.0 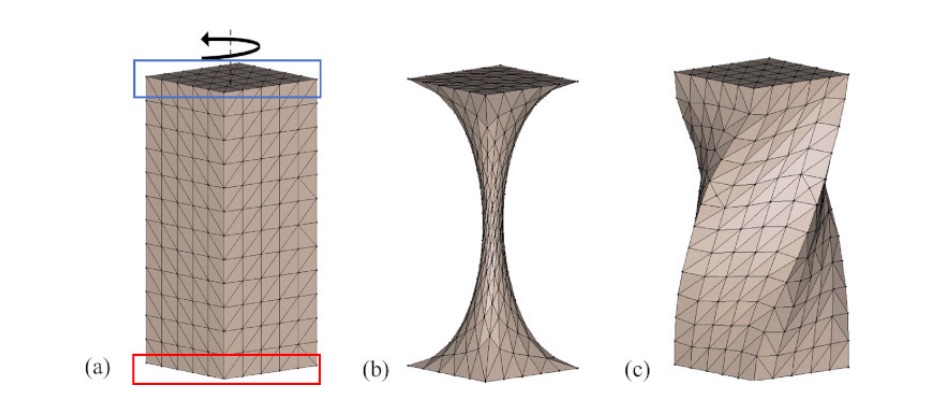
(a) Una barra viene ruotata di 90 °. (b) Il risultato senza preservare la sua forma sembra irreale. (c) Conservando la forma originale di ciascun elemento, la simulazione numerica può imitare il fenomeno fisico. 
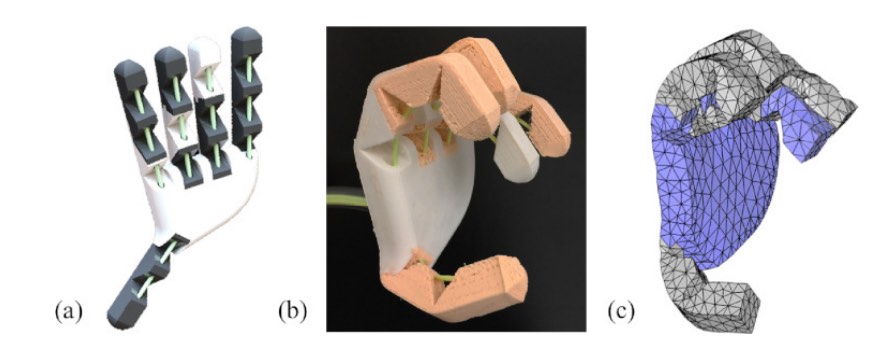
Una mano morbida azionata da cavo con più materiali. (a) Il modello digitale progettato con composizioni di materiali diversi su dita diverse. (b) Il modello fisico attivato fabbricato dalla stampa 3D e le dita hanno forme diverse sotto la stessa attuazione. (c) Il risultato della simulazione generato dal metodo proposto.