Corea: il sistema antropomorfo per robot (HRI) open source stampabile in 3D
Hyeonjun Park e Donghan Kim della Kyung Hee University in Corea stanno innovando nel campo della robotica, illustrando in dettaglio i loro sforzi nel recente sistema ” Una mano robotica antropomorfa open source: mano HRI “.
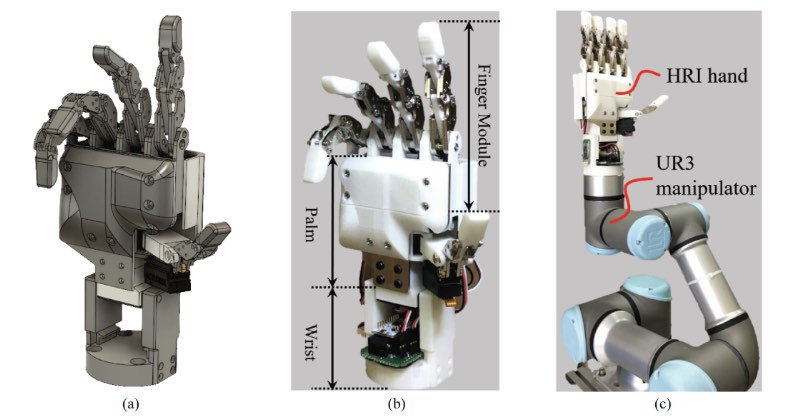
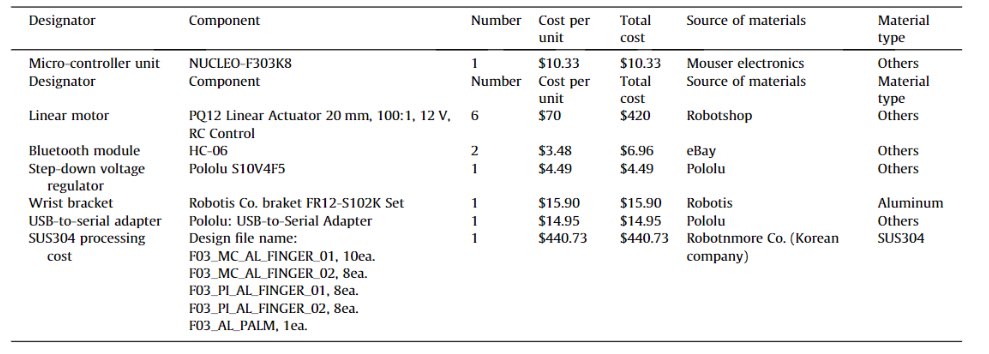
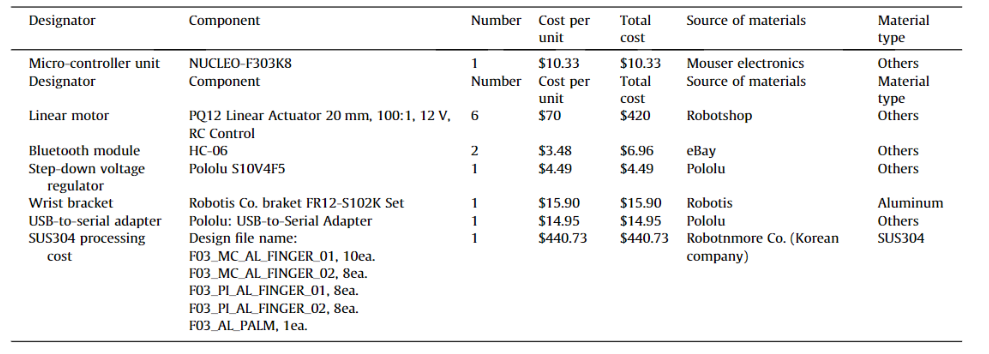
Il sistema manuale HRI è open source ed economico, che consente agli utenti di stampare in 3D il sistema per circa $ 500. Sviluppato con una struttura a cinque dita, gli autori hanno creato la mano pensando alla robotica collaborativa. Questa è un’idea che continua a crescere nel settore manifatturiero, consentendo ai robot di collaborare al completamento delle attività con i lavoratori industriali umani. Anche i dispositivi di estremità sono sempre più utilizzati, utilizzati per la presa e l’assemblaggio “al di là della semplice operazione di prelievo e posizionamento delle parti”.
La tipica mano robotica è disponibile sia nel tipo a pinza (il più comune) che in quello antropomorfo a più dita. Sebbene la pinza sia spesso utilizzata da utenti industriali, è in grado solo di svolgere le attività più elementari e non è in grado di fornire supporto per macchine operatrici o qualsiasi lavoro che richieda precisione. D’altra parte, “il tipo antropomorfo imita la mano umana sia nella forma che nella funzione, con cinque dita e la capacità di eseguire” applicazioni più ampie rispetto al semplice tipo di pinza “.
Con funzioni più complesse, tuttavia, nasce la necessità di parti e software più complessi come attuatori, una varietà di meccanismi e algoritmi di controllo che devono essere scritti.
La mano antropomorfa, disegnata secondo una tipica mano maschile, ha quattro dita che includono:
Interfalangea distale (DIP)
Interfalangea prossimale (PIP)
Articolazioni metacarpo-falangee (MCP)
Il pollice è composto da:
Interfalangea (IP)
Metacarpo-falangea (MCP)
Carpometacarpal (CMC) articolazioni
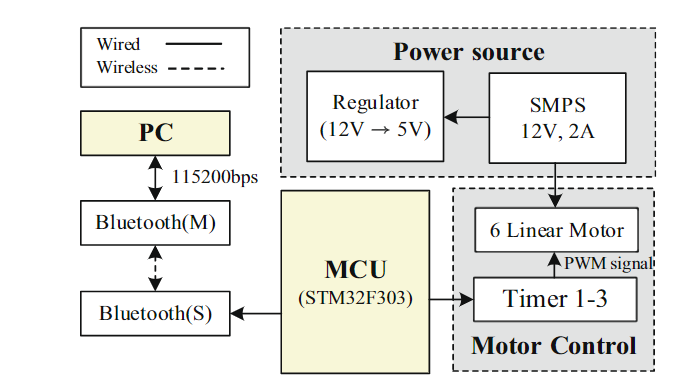
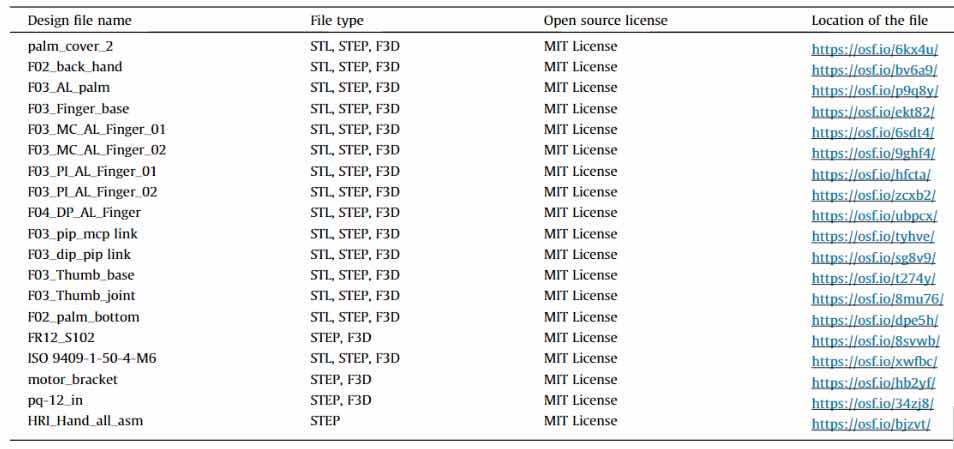
La parte del pollice “… aziona giunti MCP e CMC con due motori. Il motore viene controllato in base al segnale di controllo ricevuto dall’unità microcontrollore (MCU) tramite comunicazione Bluetooth. Viene fornito anche un pacchetto URDF, nodo python e rviz per supportare il Robot Operating System (ROS). Tutti i file di progettazione CAD hardware e i codici sorgente del software sono stati rilasciati e possono essere facilmente assemblati e modificati “, hanno spiegato gli autori.
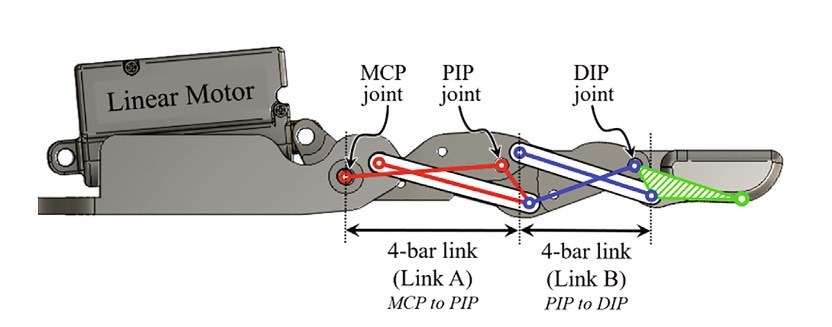
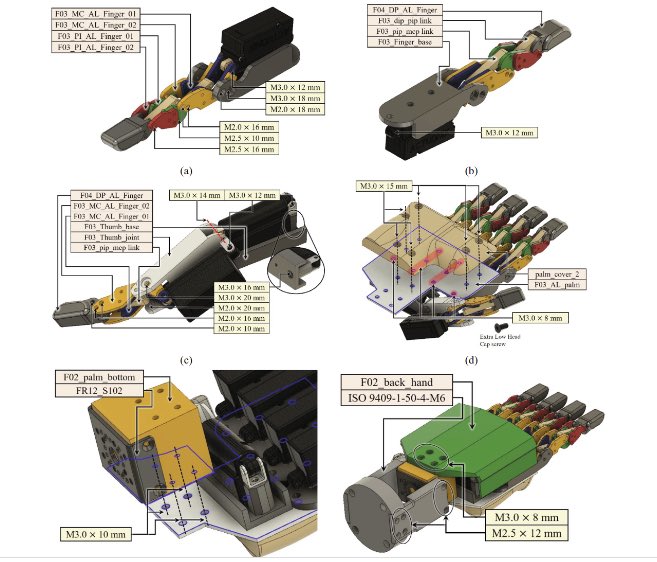
I moduli finger includono quattro collegamenti e tre giunti (giunti MCP, PIP e DIP).
Il documento di ricerca include anche tutti i dettagli per file hardware, file software, assemblaggio, configurazione elettronica, procedure operative, procedura del sistema operativo del robot e altro.
“Il sistema proposto in questo documento è sviluppato con una struttura a cinque dita, ma ogni dito è modulare, quindi può essere sviluppato con dispositivi di estremità di varie forme a seconda della forma del palmo. Ad esempio, è possibile costruire vari tipi di dispositivi di estremità a seconda dello scopo del ricercatore, come pinze a due dita con due dita o pinze a tre dita con tre dita “, hanno concluso gli autori.
“Per coloro che sono interessati all’implementazione di una varietà di applicazioni robotiche utilizzando il sistema proposto, consigliamo vivamente di contattare l’autore corrispondente per discutere di una potenziale collaborazione.”
Procedure di assemblaggio per la mano HRI: (a) parte anteriore del dito, (b) parte posteriore del dito, (c) parte del pollice, (d) palmo e palmo della mano, (e) parte del polso, (f) parte posteriore dell’HRI coperchio manuale e parte ISO 9409-1-50-4-M6