I RICERCATORI DELLA UC SAN DIEGO SVILUPPANO UN NUOVO METODO DI STAMPA 3D DI ATTUATORI ROBOTICI MORBIDI
Un team di ricercatori della UC San Diego ha sviluppato un nuovo metodo di stampa 3D di elastomeri a cristalli liquidi (LCE), che consente proprietà classificate funzionalmente semplicemente variando i parametri di stampa.
Con potenziali applicazioni come materiale di attivazione per robotica morbida e muscoli artificiali, le capacità di rigidità e contrazione di LCE possono essere controllate da vicino con il calore, sia durante che dopo la stampa.
Zijun Wang, primo autore dello studio, spiega: “La stampa 3D è un ottimo strumento per fare tante cose diverse – ed è ancora meglio ora che possiamo stampare strutture che possono contrarsi e irrigidirsi a piacere sotto un certo stimolo, in questo caso , calore. “
Gli LCE sono in grado di attuare un’elevata reversibilità e allo stesso tempo producono grandi densità di lavoro. In teoria, questo li rende ottimi per nuovi robot morbidi e dispositivi indossabili, ma i precedenti tentativi di stampare in 3D il materiale con proprietà classificate o variabili si sono dimostrati difficili. Ad esempio, probabilmente vorresti che le articolazioni del tuo robot fossero più flessibili, ma le travi portanti fossero un po ‘più rigide.
Guardando più da vicino, l’azione di attivazione di un LCE è determinata dal cambiamento nell’orientamento dei suoi mesogeni ( unità fondamentali che compongono un cristallo liquido). Un certo numero di metodi sono stati precedentemente utilizzati quando si tenta di riallineare i mesogeni, inclusi lo stiramento meccanico e i campi magnetici, ciascuno con le proprie limitazioni uniche.
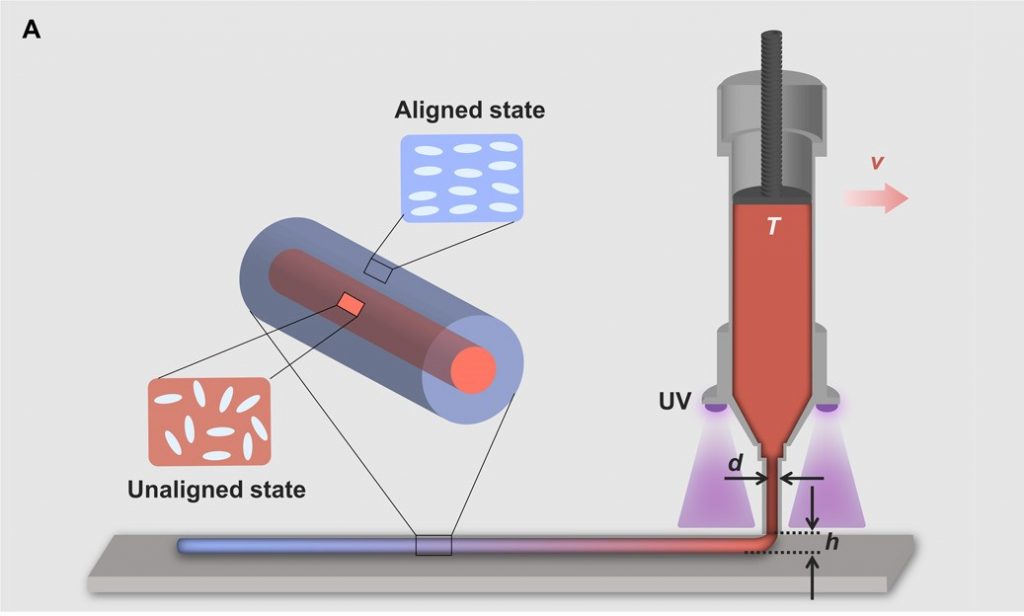
Allo stato attuale, il metodo di maggior successo per stampare strutture LCE è la tecnica di scrittura a inchiostro diretto, in base alla quale i volumi controllati di un inchiostro liquido vengono erogati da un micrugello e polimerizzati alla luce UV. In precedenza è stato osservato che i mesogeni si allineano spontaneamente lungo il percorso di stampa a causa delle sollecitazioni di taglio causate dall’estrusione. Prendendo questa tecnica di scrittura diretta a inchiostro e correndola con essa, i ricercatori di San Diego hanno dato il loro contributo al processo e hanno sperimentato le variazioni della temperatura di stampa.
Esaminando prima le caratteristiche del materiale, il team è stato in grado di determinare che l’LCE estruso aveva una struttura core-shell. Il guscio, essendo all’esterno, si raffredda più rapidamente e diventa più rigido, sospendendo i mesogeni ben allineati in una matrice ad alta viscosità. Il nucleo, d’altra parte, rimane riscaldato più a lungo e rimane malleabile, il che significa che i suoi mesogeni sono relativamente liberi di tornare al loro stato caotico e non allineato.
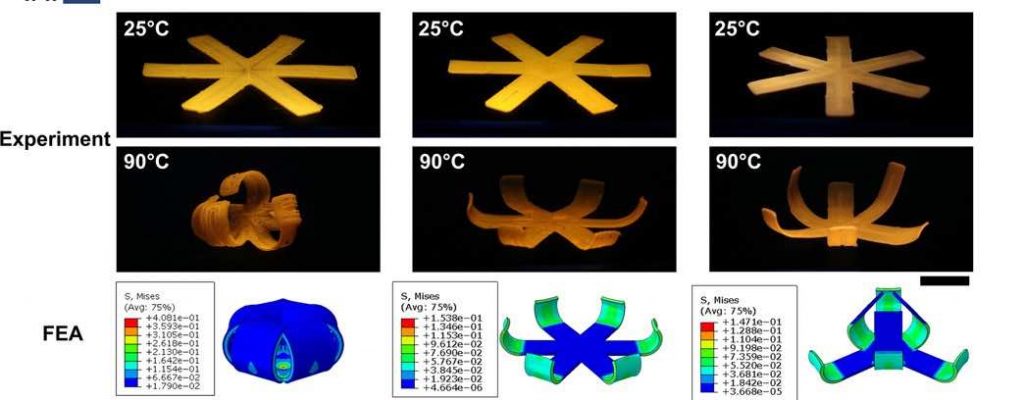
Per testare questa relazione apparentemente fondamentale tra calore e rigidità, i ricercatori hanno stampato una serie di geometrie con profili di temperatura variabili. Un disco è stato prima stampato a 40 ° C e riscaldato a 90 ° C a bagnomaria, trasformandosi in una forma più conica. Tuttavia, quando lo stesso disco è stato stampato a temperature variabili con intervalli crescenti – 40 ° C, 80 ° C, poi 120 ° C – si è trasformato in una forma completamente diversa dopo essere stato immerso nel bagnomaria.
Le stesse dinamiche sono state osservate durante la stampa di una struttura tubolare. Il tubo LCE, se stampato a temperature modificate, potrebbe aderire a una superficie di vetro molto più a lungo, se azionato, rispetto a uno stampato a temperatura costante. Con questo, il team aveva essenzialmente prodotto una pinza robotica molto rudimentale. Le fasi successive della ricerca riguardano lo sviluppo di inchiostri nuovi e innovativi che sono riprogrammabili e persino riciclabili.
Ulteriori dettagli dello studio possono essere trovati nel documento intitolato ” Stampa tridimensionale di elastomero a cristalli liquidi con classificazione funzionale “. È coautore di Zijun Wang, Zhijian Wang, Yue Zheng et al.
Il campo della robotica morbida è ben studiato, con nuovi sviluppi raggiunti ogni anno. Un team di ricercatori dell’Università di Linköping , in Svezia, ha recentemente sviluppato una serie di microattuatori adatti a microrobot morbidi utilizzando una stampante 3D basata su estrusione personalizzata. Gli attuatori contengono un polimero elettricamente attivo che può cambiare la sua geometria in presenza di una carica elettrica, garantendo agli attuatori capacità 4D.
Altrove, in Asia, i ricercatori hanno recentemente stampato in 3D un dito robotico morbido . Il dispositivo è alimentato da un sensore di curvatura triboelettrico a singolo elettrodo incorporato (S-TECS) e può rilevare la curvatura di flessione a frequenze di lavoro ultra basse senza la necessità di alcuna fonte di alimentazione esterna.