I robot morbidi (soft robots) sono spesso basati su elastomeri e materiali flessibili per interagire con oggetti irregolari o con tessuti delicati. Il problema è che, nella pratica, ottenere movimenti ripetibili e “programmati” richiede geometrie interne (canali, gradienti di materiale, zone cedevoli) che molte volte si costruiscono con stampi, colate e laminazioni in più passaggi: un flusso che rende l’iterazione progettuale lenta e poco standardizzabile.
Che cosa ha fatto Harvard (SEAS) e chi sono i protagonisti
Un team della Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) ha descritto un metodo per stampare strutture morbide che incorporano canali cavi posizionati con precisione, così che, quando vengono pressurizzati con aria, la struttura si piega e si deforma secondo traiettorie previste. Il lavoro è associato al laboratorio di Jennifer A. Lewis (Wyss Institute/SEAS) e guidato da Jackson Wilt con Natalie Larson (co-autori; Larson oggi è a Stanford). Harvard indica che lo studio è pubblicato su Advanced Materials.
La tecnologia: “rotational multimaterial 3D printing” (RM-3DP)
Il cuore del metodo è la cosiddetta rotational multi-material 3D printing (RM-3DP): invece di alternare materiali con ugelli diversi o con fasi separate, il sistema co-estrude più materiali da un singolo ugello mentre l’ugello può ruotare durante la deposizione. La combinazione di geometria dell’ugello, velocità di rotazione, portate e traiettoria consente di “scrivere” nel filamento una architettura interna orientata, con controllo su posizione e sezione del canale che diventerà il circuito pneumatico.
Materiali e architettura del filamento: guscio elastomerico + nucleo sacrificabile
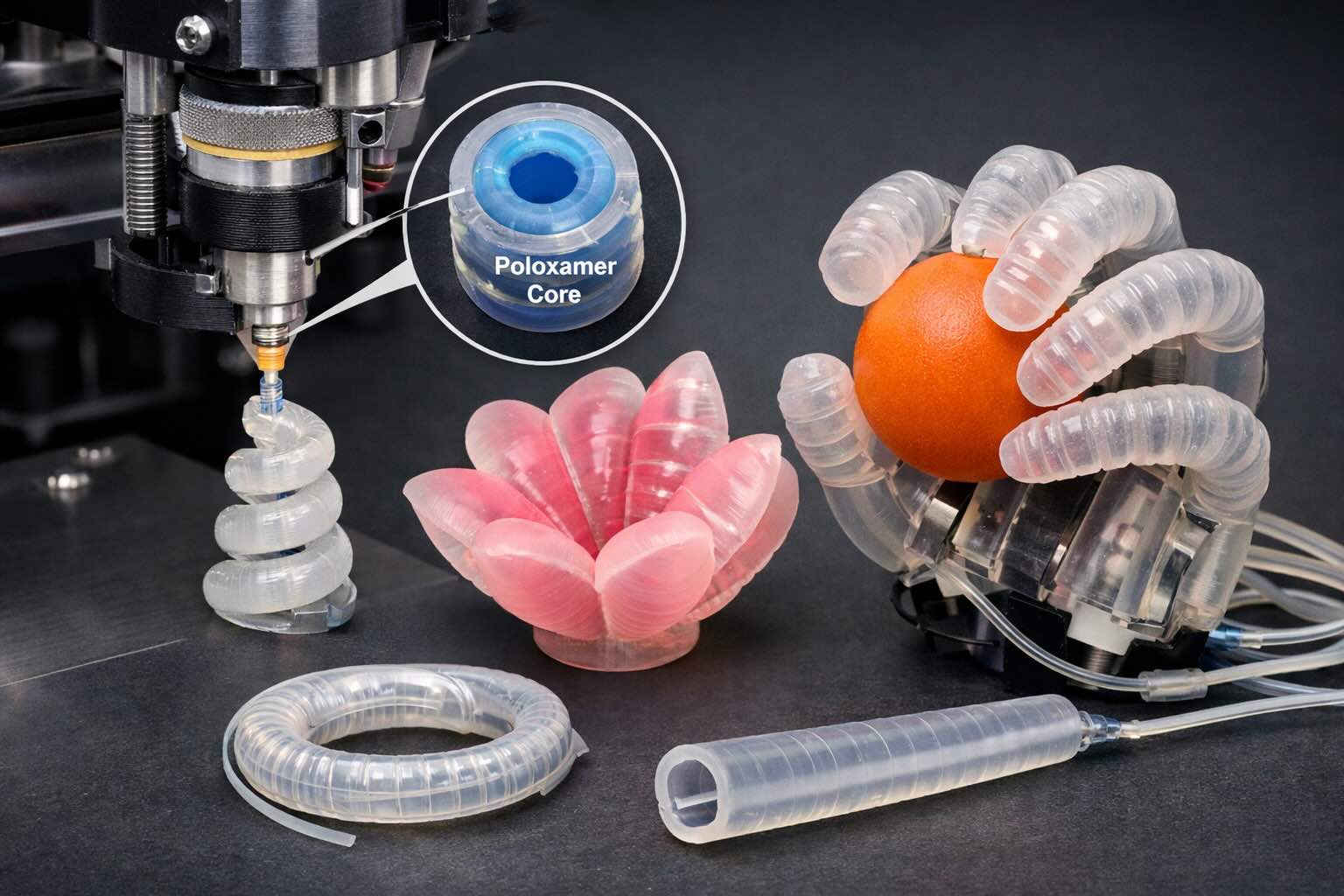
Nel racconto di Harvard/SEAS e nelle coperture tecniche, il filamento è descritto come una struttura core-shell: un guscio esterno in poliuretano (o resina poliuretanica fotopolimerizzabile, nelle descrizioni tecniche) e un nucleo interno sacrificabile a base di poloxamer (in letteratura spesso indicato come Pluronic F-127, un gel usato anche in formulazioni “tipo hair gel”). Dopo la solidificazione/reticolazione del guscio, il nucleo viene rimosso (lavaggio o rimozione con acqua fredda), lasciando un canale interno continuo.
Come si “programma” la deformazione: canali asimmetrici e orientamento lungo il percorso
Il principio meccanico è semplice: se il canale interno è asimmetrico rispetto alla sezione del filamento, quando lo si gonfia la struttura tende a incurvarsi verso la parte con risposta elastica diversa (spessori/posizione del vuoto). Il metodo RM-3DP mira a controllare orientamento, forma e area di questi canali lungo il filamento, così da ottenere transizioni di forma che vanno da 1D→2D (curvature planari) fino a 1D→3D (torsioni e configurazioni spaziali) e trasformazioni 2D→3D in motivi più ampi.
Dalla singola “fibra” al dispositivo: percorsi continui e pianificazione automatica (Fermat spirals)
Un aspetto pratico è la possibilità di costruire dispositivi complessi con percorsi continui, riducendo discontinuità e assemblaggi. Nelle descrizioni tecniche viene riportato l’uso di una strategia di path planning basata su connected Fermat spirals, che genera traiettorie a partire da immagini/regioni e assegna direzioni di stampa e zone funzionali (ad esempio regioni che devono espandersi di più o piegarsi come “cerniere”). Questo tipo di pianificazione aiuta quando si passa da pattern elementari a forme “organiche” o personalizzate.
Dimostrazioni: “fiore” a spirale e mano prensile a cinque dita
Per mostrare cosa si può costruire, il gruppo riporta due esempi citati in più resoconti: (1) un attuatore a spirale tipo fiore, stampato lungo un percorso continuo, che cambia configurazione all’aumentare della pressione; (2) una mano/greifer a cinque dita con zone che funzionano come “nocche”, dove la curvatura è indotta dai canali interni e può essere gestita anche in sequenza.
Che cosa cambia rispetto ai metodi tradizionali e dove potrebbe servire
Harvard sottolinea soprattutto l’eliminazione della dipendenza da stampi e la possibilità di personalizzare rapidamente la risposta di attuazione, perché canali e orientamenti non vengono “disegnati” in una matrice con fasi manuali, ma derivano direttamente dai parametri di stampa e dal percorso. Le applicazioni citate includono strumenti di robotica chirurgica e dispositivi assistivi per l’interazione con persone, oltre a scenari generali in cui servono prese e deformazioni controllate senza componenti rigidi.
Riferimento scientifico e dettagli editoriali
La notizia Harvard/SEAS è datata 6 febbraio 2026 e rimanda alla pubblicazione su Advanced Materials; una copertura tecnica riporta anche un DOI associato all’articolo (10.1002/adma.202510141). In parallelo è disponibile un preprint che descrive in modo esteso materiali (poliuretano-acrilato fotopolimerizzabile e gel a base Pluronic F-127), parametri di processo e risultati sperimentali.