Magnetoelettronica stampata in 3D per oggetti intelligenti e meccatronica 4D
Un gruppo di ricerca tedesco ha mostrato un nuovo modo di integrare la sensoristica magnetica nei componenti stampati in 3D. Il lavoro, pubblicato su Advanced Science con il titolo “3D-Printed Magnetoelectronics for Interactive Appliances and Self-Aware 4D-Printed Mechatronics”, riguarda una famiglia di strutture magnetoelettroniche prodotte con manifattura additiva, capaci di rilevare posizione, rotazione, deformazione e interazione con l’ambiente senza dover aggiungere sensori esterni dopo la stampa.
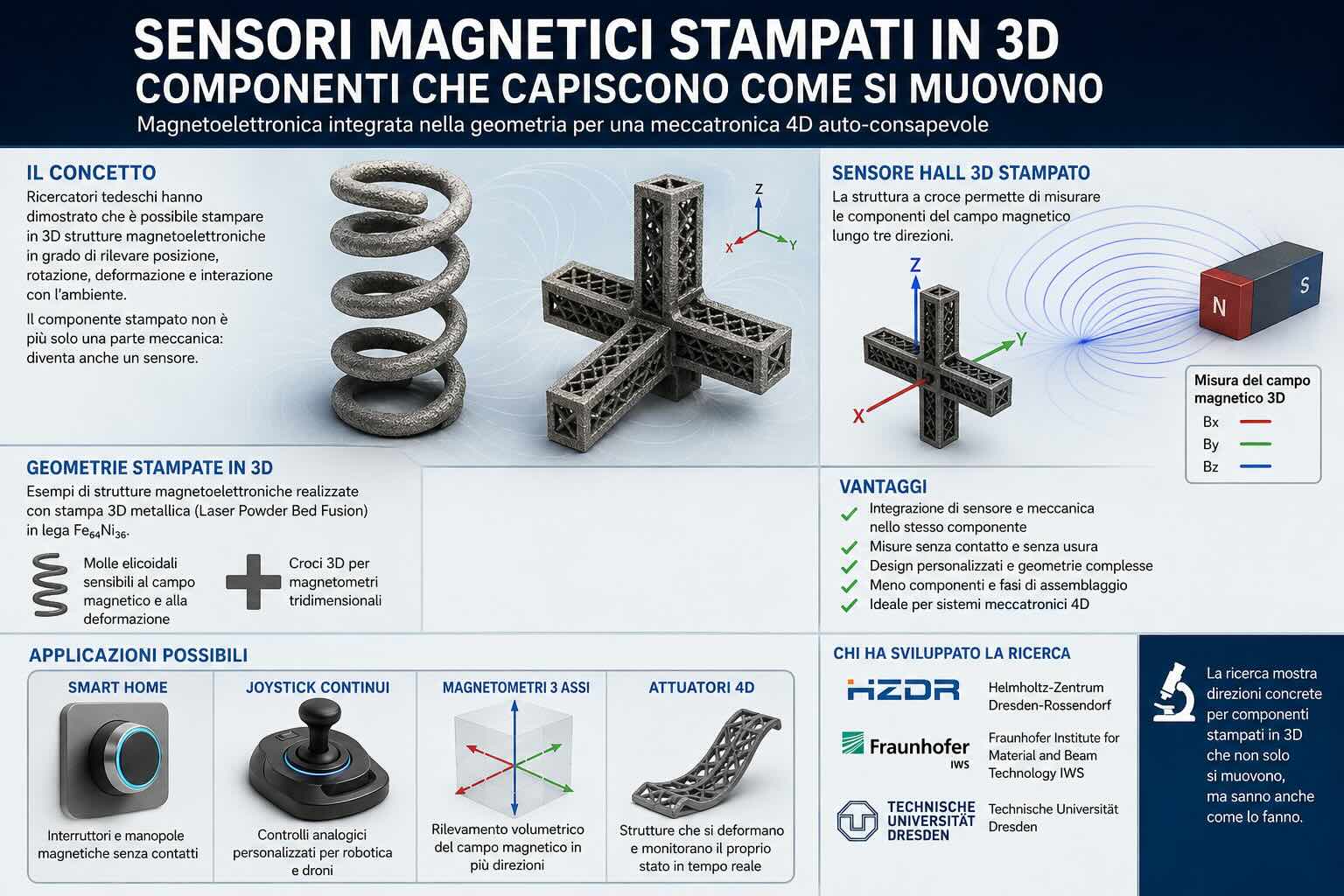
La ricerca coinvolge il Helmholtz-Zentrum Dresden-Rossendorf, il Fraunhofer Institute for Material and Beam Technology IWS e la Technische Universität Dresden. Tra gli autori figurano Eduardo Sergio Oliveros-Mata, Anna Martin Vilardell, Fabian Ganss, Christoph Leyens, Lukas Stepien e Denys Makarov. Non si tratta quindi di un semplice esercizio su un componente plastico con un sensore incollato sopra, ma di un approccio in cui la geometria stampata diventa parte attiva del sistema di misura.
Che cosa cambia rispetto a un normale componente stampato
Nella maggior parte dei prototipi meccatronici stampati in 3D, la parte realizzata con additive manufacturing svolge una funzione meccanica: supporto, involucro, leva, cerniera, manopola, staffa o elemento elastico. Sensori, cavi, magneti e schede elettroniche vengono poi montati in una fase successiva. Questo metodo funziona, ma introduce passaggi di assemblaggio, tolleranze da controllare, punti di guasto e vincoli di progettazione.
Il lavoro pubblicato su Advanced Science prova a spostare una parte di questa funzione dentro il componente stesso. L’idea è stampare geometrie metalliche magneticamente sensibili che possano funzionare come sensori di campo magnetico, mantenendo al tempo stesso una forma tridimensionale utile per applicazioni meccaniche. In pratica, il componente non è più soltanto una forma: diventa anche un elemento di lettura.
Questo è il punto più interessante per chi lavora con stampa 3D, robotica, prototipazione funzionale e sistemi intelligenti. Un joystick, una molla, una cerniera o un attuatore possono essere progettati non solo per muoversi, ma anche per fornire un segnale elettrico legato al proprio movimento.
La magnetoelettronica entra nella geometria stampata
La magnetoelettronica sfrutta fenomeni elettrici legati ai campi magnetici. I sensori Hall, i sensori magnetoresistivi e quelli basati su magnetoimpedenza sono esempi noti: misurano un campo magnetico e trasformano questa informazione in un segnale elettrico. In molti prodotti questi sensori vengono usati per rilevare posizione, velocità, rotazione, apertura o chiusura.
Il passaggio studiato dal team tedesco consiste nel realizzare strutture magnetiche direttamente tramite stampa 3D metallica. Nel paper viene indicato l’uso di Laser Powder Bed Fusion, quindi una tecnologia a letto di polvere metallica, per produrre componenti in lega Fe64Ni36, una lega ferro-nichel scelta per conducibilità, permeabilità magnetica e stabilità dimensionale.
Questo dettaglio è importante: non parliamo di una classica stampa FDM con filamento magnetico caricato, né di una traccia conduttiva depositata su una superficie. Il lavoro riguarda componenti metallici tridimensionali che possono presentare una risposta magnetoelettronica misurabile. Il gruppo ha stampato forme come molle elicoidali e croci 3D, cioè geometrie che non sarebbero semplici da ottenere con processi planari tradizionali.
Perché usare il magnetismo come sistema di rilevamento
Il magnetismo ha un vantaggio pratico: permette di misurare senza contatto meccanico. Una parte può capire se un magnete è vicino, se una leva ha ruotato, se un coperchio è chiuso o se un elemento elastico ha cambiato posizione. Il tutto può avvenire anche attraverso materiali non magnetici, senza strisciamenti, contatti elettrici esposti o parti soggette a usura.
Per questo motivo i sensori magnetici sono già diffusi in molti settori: automotive, elettrodomestici, smartphone, console, sistemi di sicurezza, robotica e interfacce uomo-macchina. La differenza, in questo caso, è che la stampa 3D apre la possibilità di dare al sensore una forma coerente con il componente meccanico, invece di costringere il componente ad adattarsi a un sensore commerciale piatto o rigido.
Un esempio semplice è una manopola. In un prodotto tradizionale la rotazione viene rilevata con un encoder, un potenziometro, un sensore Hall o un altro dispositivo montato in posizione precisa. Nel nuovo approccio, parte del sistema di misura può essere costruita nella struttura stampata, riducendo componenti separati e fasi di montaggio.
Molle, croci 3D e sensori Hall tridimensionali
Nel paper vengono presentate due famiglie di geometrie utili per capire il potenziale del metodo. La prima è una struttura elicoidale simile a una molla. Questa forma può deformarsi, può essere parte di un attuatore e può anche fornire un segnale magnetico legato al proprio stato. La seconda è una croce tridimensionale, progettata per funzionare come sensore Hall 3D.
La struttura a croce consente di misurare componenti del campo magnetico lungo tre direzioni. Nei sensori classici questo richiede spesso più elementi orientati con precisione oppure architetture più complesse. Con la stampa 3D metallica, invece, la geometria del sensore può essere costruita nello spazio, con segmenti conduttivi orientati secondo assi diversi.
Il risultato non è soltanto un oggetto stampato, ma una piattaforma di misura tridimensionale. È un passaggio utile per interfacce touchless, controlli spaziali, robotica e sistemi nei quali posizione e deformazione devono essere monitorate in tempo reale.
Che cosa significa “meccatronica 4D auto-consapevole”
L’espressione “self-aware” va letta in modo tecnico, non come se il componente avesse una forma di intelligenza autonoma. Nel contesto del paper indica una struttura meccatronica capace di rilevare il proprio stato: posizione, deformazione, attuazione o interazione con l’ambiente. Il segnale generato dal componente può poi essere usato da un circuito di controllo.
Qui entra in gioco anche la stampa 4D. Con questa espressione si indicano strutture stampate in 3D che cambiano forma, proprietà o funzione nel tempo quando ricevono uno stimolo: calore, luce, acqua, corrente elettrica o campo magnetico. Nella meccatronica 4D, il problema non è solo far muovere il componente, ma sapere come si sta muovendo.
Molte dimostrazioni di stampa 4D mostrano strutture che si piegano, si aprono, si chiudono o si deformano. Per passare dal dimostratore da laboratorio a un sistema controllabile serve però un feedback. Se un attuatore si muove ma non comunica il proprio stato, il controllo resta limitato. L’integrazione della magnetoelettronica stampata può aiutare a chiudere questo anello: la parte si muove e, allo stesso tempo, produce informazioni sul movimento.
Applicazioni possibili: smart home, robotica e prototipi funzionali
Il paper mostra alcuni casi d’uso pensati per evidenziare il potenziale del metodo. Tra questi ci sono interruttori magnetici per la smart home, joystick continui per il controllo robotico, magnetometri a tre assi per rilevamento volumetrico e attuatori meccatronici 4D capaci di monitorare il proprio stato.
Nel caso della smart home, si può immaginare un pulsante, una chiusura o una manopola in cui il rilevamento avviene senza contatti meccanici tradizionali. Per la robotica, un joystick stampato su misura potrebbe fornire un controllo analogico più integrato nella forma del dispositivo. Per gli attuatori 4D, invece, il valore sta nella possibilità di progettare parti deformabili che non dipendono soltanto da sensori montati all’esterno.
Queste applicazioni non vanno viste come prodotti pronti da comprare a scaffale. Sono dimostratori, ma indicano una direzione concreta: usare la stampa 3D non solo per abbreviare la costruzione della parte meccanica, ma anche per integrare funzioni elettriche e magnetiche nella stessa geometria.
Perché questo interessa la manifattura additiva
La stampa 3D ha già dimostrato il proprio valore nella produzione di geometrie complesse, alleggerimento, personalizzazione e riduzione degli assemblaggi. Il passo successivo è rendere le parti più funzionali. Questo significa integrare canali, circuiti, sensori, attuatori, materiali graduati e risposte fisiche progettate.
Il lavoro del gruppo di Dresda si inserisce in questa tendenza. La parte stampata non sostituisce tutti i componenti elettronici, ma può ridurre il numero di elementi separati. Un meccanismo che include già una funzione di rilevamento può richiedere meno cablaggi, meno fissaggi, meno calibrazioni meccaniche e meno punti in cui l’assemblaggio può fallire.
Per la prototipazione questo può essere molto utile. Nei laboratori di ricerca, nei reparti R&D e nei team che sviluppano interfacce fisiche, poter stampare una geometria sensibile al campo magnetico consente di provare più varianti in tempi brevi. Si può modificare la forma della molla, lo spessore di un braccio, la disposizione delle piste, la posizione dei contatti e il comportamento del sistema senza ripartire da un’architettura elettronica standard.
I limiti da considerare
Come spesso accade nella ricerca sui materiali funzionali, il risultato va letto con equilibrio. La stampa 3D metallica a letto di polvere non è un processo banale: richiede macchine industriali, polveri qualificate, parametri laser controllati, post-processing e competenze metallurgiche. Non siamo davanti a un metodo immediatamente trasferibile su una stampante desktop.
Ci sono anche questioni legate alla calibrazione. Un sensore magnetico integrato in una geometria complessa deve essere caratterizzato: la risposta dipende da materiale, forma, orientamento, frequenza di lavoro, temperatura e campo magnetico circostante. In un ambiente industriale bisogna inoltre considerare rumore elettromagnetico, presenza di parti ferromagnetiche vicine e stabilità del segnale nel tempo.
Un altro punto riguarda il confronto con i sensori commerciali. Un sensore Hall al silicio costa poco, è piccolo, maturo e disponibile in enormi volumi. La stampa 3D non lo sostituirà in tutti gli impieghi. Il valore emerge dove la geometria del componente, l’integrazione meccanica o la personalizzazione rendono vantaggioso costruire una funzione di misura direttamente nella parte.
Il ruolo di HZDR, Fraunhofer IWS e TU Dresden
Il progetto nasce in un contesto di ricerca tedesco con competenze che uniscono magnetismo, materiali, additive manufacturing e sensoristica. Helmholtz-Zentrum Dresden-Rossendorf lavora da anni su materiali intelligenti e magnetoelettronica flessibile. Fraunhofer IWS porta competenze su materiali, processi laser e tecnologie di produzione. Technische Universität Dresden contribuisce al quadro scientifico e ingegneristico dell’area materiali.
Nel perimetro più ampio di questa linea di lavoro compare anche HZDR Innovation GmbH, che presenta soluzioni legate a sensori magnetici flessibili e stampabili. È un segnale utile: la magnetoelettronica non è soltanto un tema accademico, ma un ambito che può arrivare a interfacce industriali, dispositivi smart, automazione e sistemi di misura personalizzati.
Una direzione più che un prodotto finito
Il risultato più interessante di questo studio è il cambio di prospettiva. La stampa 3D non viene usata solo per dare forma a un pezzo, ma per distribuire una funzione nel volume del pezzo. Invece di progettare meccanica ed elettronica come elementi separati, il componente può essere pensato come un sistema unico: struttura, sensore e interfaccia.
Per arrivare a un impiego industriale serviranno strumenti di progettazione dedicati, librerie di geometrie sensibili, modelli di simulazione affidabili, procedure di calibrazione e linee guida per la produzione. Anche i software di progettazione e slicing dovranno evolvere, perché progettare un sensore 3D non significa soltanto disegnare una forma: significa prevedere come quella forma risponderà a un campo magnetico e come il segnale verrà letto.
Per ora il lavoro mostra una possibilità concreta: componenti stampati in 3D che non hanno bisogno di essere “resi intelligenti” solo con elettronica esterna, perché una parte della capacità di percezione può nascere già nella loro geometria. Per robotica soft, smart home, interfacce uomo-macchina e stampa 4D, è un passaggio da seguire con attenzione.