I ricercatori creano un processo dinamico di autoassemblaggio per la costruzione di micromacchine mobili
Una micromachina ha il potenziale per manipolare e sondare il mondo microscopico e può essere composta da più sostanze chimiche, materiali o parti al fine di affrontare diverse funzioni, come attuazione, consegna , rilevamento e trasporto. Le sue modalità prestazionali e funzionali possono essere comandate dall’interazione e dall’organizzazione dei suoi componenti variabili e possono essere stampate in 3D, ma è difficile costruire assiemi strutturali programmabili in micromacchine mobili.
Un gruppo di ricercatori del Max Planck Institute for Intelligent Systems e ETZ Zurich hanno pubblicato uno studio su Nature Materials , intitolato ” Assemblaggio dinamico di micromacchine mobili con codifica di forma “, in cui hanno introdotto un nuovo processo diretto e dinamico di autoassemblaggio per la costruzione di dispositivi mobili micromacchine composte, con configurazioni specifiche.
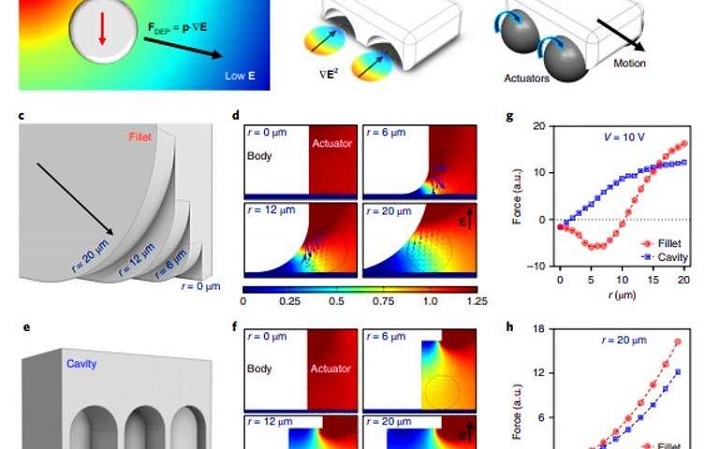
Il processo utilizza interazioni fisiche pre-programmate tra unità strutturali e motrici ed è guidato da interazioni dielettroforetiche (DEP) codificate nella forma 3D di singole parti. Queste forze DEP modulano la geometria 3D della parte al fine di “codificare la distribuzione controllata con precisione dei gradienti di campo elettrico attorno a un corpo”.
Codifica spaziale dei siti di attrazione DEP modulando la geometria 3D.
Innanzitutto, i ricercatori – Yunus Alapan, Berk Yigit, Onur Beker, Ahmet F. Demirörs e Metin Sitti – hanno programmato gradienti di campo attorno a un costrutto, in modo da poter utilizzare le interazioni DEP per “guidare l’assemblaggio di parti di micromachine” in posizioni specifiche.
“Il principio di funzionamento del dispositivo in campi elettrici si basava sulla regolazione dipendente dalla forma dei campi elettrici intorno ai corpi polarizzabili della micromachina assemblata”, afferma un pezzo di Phys.org.
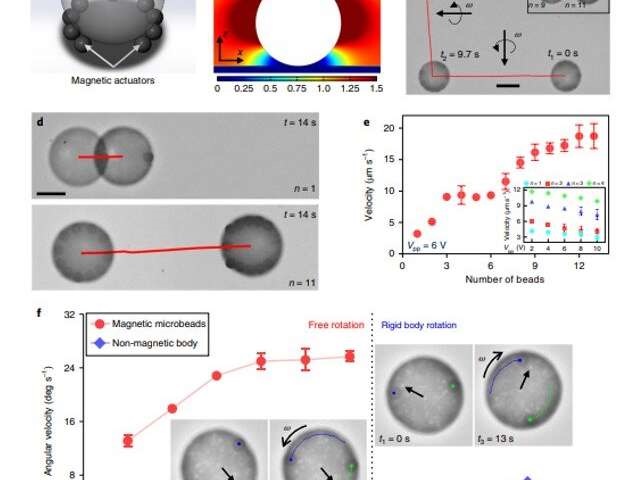
Il team aveva bisogno di un modo per programmare i gradienti locali e ha esaminato il modo in cui potevano modulare i campi non elettrici attorno a diverse geometrie. Quindi, sono stati in grado di controllare l’autoassemblaggio della micromachina mobile, che è stata influenzata dai campi elettrici, usando un microvicolo come esempio. Aveva un corpo dielettrico grande, sferico, non magnetico, con diversi piccoli attuatori magnetici che lo circondavano. Quando un campo elettrico è stato applicato sull’asse Z, il grande corpo è stato in grado di generare abbastanza gradienti di campo elettrico locale in modo da attrarre microattuatori più piccoli; questi fungevano da ruote e i ricercatori potevano guidare il microvicolo cambiando semplicemente la direzione del campo magnetico.
Assemblaggio e traduzione di un microrganismo composto con attuatori magnetici.
Quando aumentarono il numero di microattuatori, aumentò anche la velocità del microveicolo, ma quando la tensione fu aumentata, la velocità diminuì. I ricercatori pensano che ciò sia dovuto all’aumento dell’accoppiamento meccanico, durante le interazioni DEP, tra le microparticelle e il substrato.
A tensioni più basse, piccole forze DEP “hanno portato a un fenomeno di accoppiamento basato sulla lubrificazione” che ha permesso ai microattuatori di muoversi liberamente attorno al palo. Ciò significa che è possibile regolare la forza delle forze DEP tra i microattuatori e il corpo passivo per regolare il loro accoppiamento meccanico, al fine di controllare i gradi di libertà di rotazione del microveicolo.
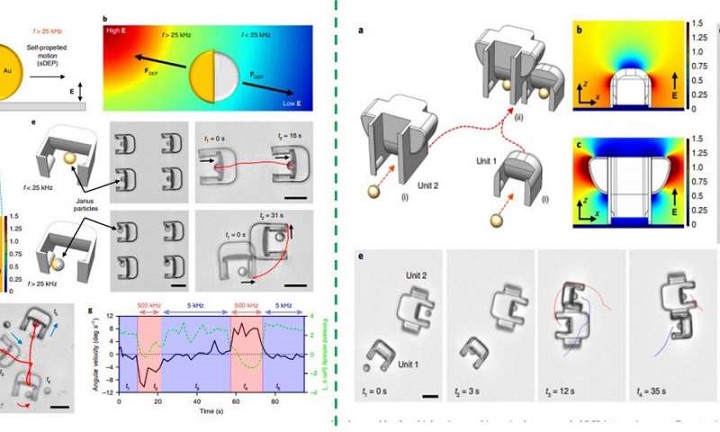
I ricercatori hanno utilizzato interazioni fisiche con codifica di forma per creare micromacchine mobili programmabili autoassemblanti sviluppando frame con geometrie 3D specifiche per aiutare a generare gradienti di campo elettrico. La struttura, realizzata con litografia a due fotoni, attira i microattuatori in posizioni specifiche sul telaio. In un esempio, hanno realizzato una microcar con tasche a quattro ruote che ha generato forze DEP e ha aiutato a guidare i microattuatori magnetici in dette tasche. In appena un secondo dall’applicazione di un campo elettrico, la microcar completò un autoassemblaggio su richiesta: le ruote magnetiche all’interno delle tasche entrarono in una rotazione libera a causa del campo magnetico a rotazione verticale.
Il prototipo è stato ampliato al fine di costruire micromacchine riconfigurabili, che sono gestite da micromotori semoventi. Le microparticelle semoventi di silice Janus (SiO 2 ) con un cappuccio d’oro sono state utilizzate per assemblare queste micromachine e la loro risposta DEP e l’auto-propulsione dipendente dalla frequenza hanno permesso di creare micromacchine mobili che presentavano auto-riparazione e organizzazione spaziale riconfigurabile. Quindi, i ricercatori hanno definito le interazioni fisiche tra queste micromacchine mobili espandendo le interazioni DEP con codifica di forma in un assieme gerarchico a due livelli:
Livello 1: attuatori semoventi assemblati con due unità di microstruttura formano micromacchine mobili con traslazione lineare
Livello 2: la generazione di campi elettrici bassi causa l’assemblaggio laterale della seconda e della prima unità
Il team di ricerca è stato in grado di estendere il loro attuale design alla manipolazione di microattuatori 3D e assemblaggio di micromachine, affermando che ha persino il potenziale per essere utilizzato con dispositivi lab-on-a-chip per manipolazione digitale, smistamento, trasporto continuo, e generazione di flusso microfluidico.
“La strategia di assemblaggio selettivo del sito era versatile e poteva essere dimostrata su diverse micromacchine mobili, riconfigurabili, gerarchiche e 3D. Gli scienziati anticipano i principi di progettazione presentati nel lavoro per far avanzare e ispirare lo sviluppo di micromacchine più sofisticate integrate in sistemi gerarchici multiscala. “
Questa strategia di progettazione consente di ottenere un autoassemblaggio programmabile attraverso l’uso dell’assemblaggio dinamico orientato alla forma delle micromacchine, che darà agli scienziati un maggiore controllo su funzioni e dinamiche. Poiché il team è stato in grado di incorporare componenti eterogenei per attuazione, caricamento del carico e rilevamento in un unico passaggio, il loro lavoro potrebbe consentire ad altri di progettare microrobot multifunzionali e multimateriali.
I ricercatori si concentreranno ora sull’ottimizzazione e l’espansione dell ‘”assemblaggio irreversibile di microcomponenti” per prestazioni migliori in applicazioni che non utilizzano campi elettrici, come le applicazioni biomediche in vivo .