La ricerca condotta da Jackson K. Wilt, Natalie M. Larson e Jennifer A. Lewis alla Harvard University introduce un metodo di rotational multi‑material 3D printing (RM‑3DP) per realizzare filamenti elastomerici con canali pneumatici interni programmabili, destinati alla robotica morbida. Il lavoro punta a “scrivere” il movimento direttamente nella materia, superando i limiti dei tradizionali processi a stampo e laminazione, ancora molto usati per la fabbricazione di attuatori pneumatici morbidi.
Perché “programmare” il movimento nei robot morbidi è complesso
I robot morbidi basati su elastomeri sono apprezzati per la capacità di piegarsi, torcersi e adattarsi a oggetti delicati, ma la loro attuazione pneumatica richiede geometrie interne precise, spesso ottenute con stampi, colate successive e laminazioni. In molti casi, piccoli cambi di curvatura, posizione delle cerniere o direzione della flessione impongono la realizzazione di nuovi stampi e il rifacimento di più fasi di assemblaggio, rallentando fortemente la progettazione iterativa e rendendo difficile standardizzare il processo.
Processo RM‑3DP: co‑estrusione core‑shell e canali cavi orientati
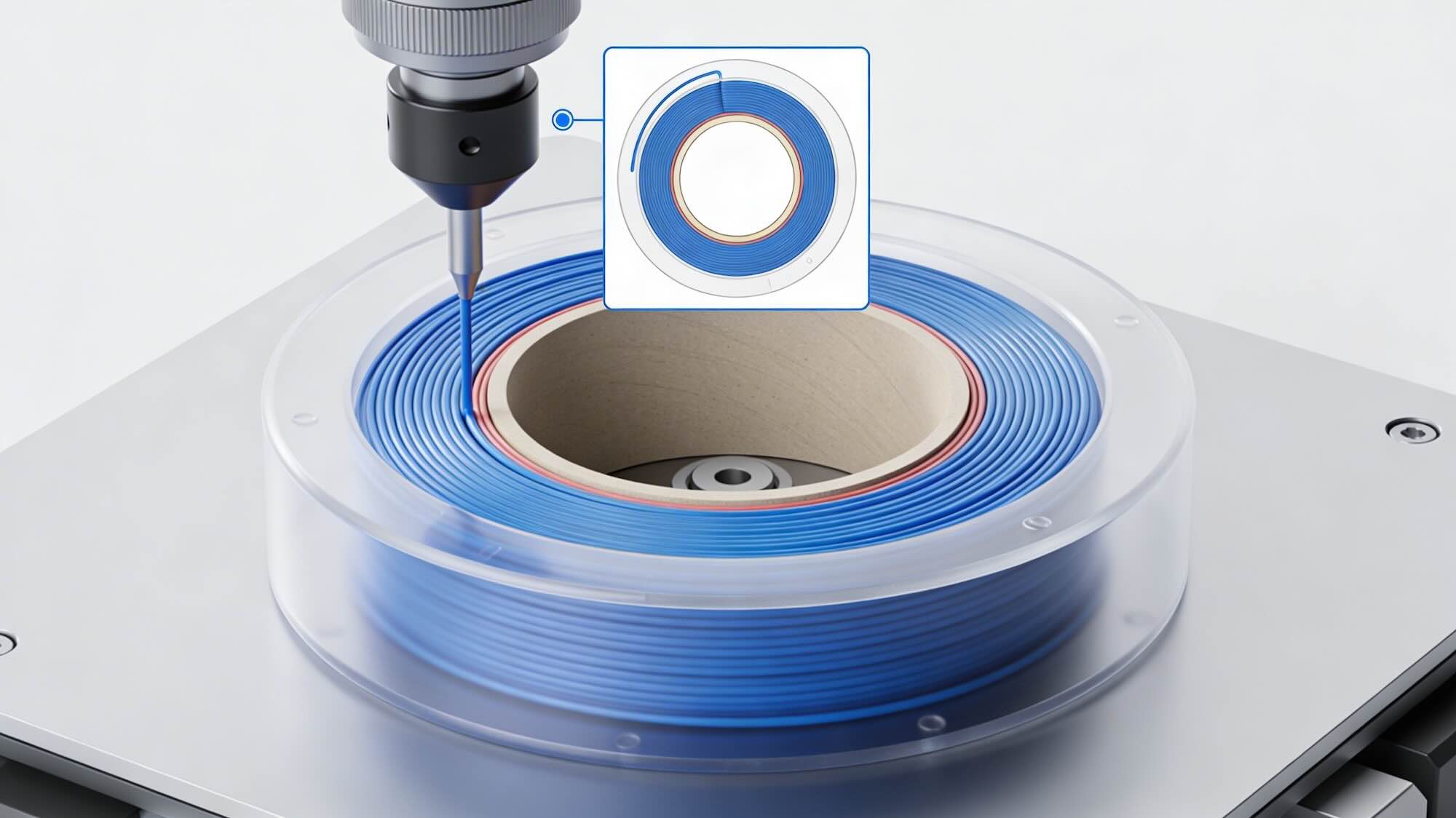
Nel metodo RM‑3DP un ugello rotante multimateriale co‑estrae un guscio elastomerico fotopolimerizzabile e un core fugace che fungerà da canale pneumatico una volta rimosso. La posizione del core all’interno della sezione del filamento, insieme alla sua forma e alla sua area, viene controllata variando geometria dell’ugello, velocità di rotazione e portate dei due materiali; dopo la deposizione, il guscio viene reticolato con UV e il core viene lavato via, lasciando una cavità continua e asimmetrica.
Dalla singola “fibra” alla deformazione programmata: piega, torsione, cerniere
Il cuore del comportamento meccanico è un condotto cavo decentrato: quando viene pressurizzato, lo spessore non uniforme del materiale circostante genera una distribuzione di tensioni che porta a una curvatura prevedibile del filamento. Mantenendo il controllo locale sull’orientazione del canale e sulla sua sezione lungo la traiettoria di stampa, i ricercatori dimostrano filamenti che possono piegarsi in direzioni opposte sullo stesso segmento, attuatori che si avvolgono a spirale, zone di torsione graduale e tratti corti che funzionano da cerniere pneumatiche concentrate.
Dimostratori: superfici attive, gripper morbidi e pianificazione dei percorsi
Oltre ai singoli filamenti, la ricerca estende l’approccio a superfici attive e a gripper multi‑dito, sfruttando percorsi continui basati su spirali di Fermat per coordinare più regioni attuabili con uno o più ingressi pneumatici. Tra i dimostratori vi sono superfici a pattern “checkerboard” in cui zone con direzioni di piega opposte creano configurazioni complesse, strutture a fiore che si aprono e si chiudono sotto pressione e una mano morbida in cui più “dita” si arricciano attorno a oggetti sfruttando condotti interni programmati lungo un unico percorso di stampa.
Confronto con altre strategie per robotica morbida
L’approccio RM‑3DP si colloca in un panorama più ampio in cui rientrano metodi come il bubble casting, che sfrutta flussi interfacciali in elastomeri in reticolazione per creare cavità pneumatiche monolitiche, o il filone Octobot, che unisce soft‑lithography e stampa 3D embedded in processi complessi multi‑step. Esistono inoltre strategie basate su stampa 3D voxel‑based multimateriale, dove la funzionalità è programmata tramite distribuzione di materiali con proprietà diverse, piuttosto che tramite geometria di cavità interne; RM‑3DP aggiunge la possibilità di controllare in modo continuo un condotto cavo interno a livello di singolo filamento, con un legame diretto tra parametri di stampa, geometria interna e risposta meccanica.
Limiti attuali: durabilità, scala delle feature, controllo di processo
Gli esperimenti evidenziano che la pressione massima raggiungibile è limitata da fenomeni di rigonfiamento o rottura dell’elastomero, il che rende il controllo dello spessore del guscio e della qualità del materiale un fattore critico per applicazioni reali. Man mano che la lunghezza dei condotti e la complessità del loro percorso aumentano, diventano centrali la ripetibilità della rimozione del core, l’ispezione delle cavità interne e la stabilità del processo su diametri di filamento più piccoli, che richiedono reologia più controllata, ugelli più precisi e gestione accurata della polimerizzazione e del lavaggio.
Prospettive applicative e collegamenti con la robotica morbida
Un’evoluzione probabile del lavoro è l’integrazione dell’RM‑3DP in piattaforme che combinano testine rotanti multimateriale, inchiostri elastomerici utilizzabili in applicazioni avanzate e software in grado di tradurre campi di deformazione desiderati in percorsi di stampa ottimizzati, supportati da simulazioni. Le prime applicazioni concrete potrebbero emergere in gripper delicati, dispositivi indossabili o body‑conformal e prototipi chirurgici morbidi, proseguendo la linea di sviluppo della robotica morbida che punta a prese controllate, alta conformabilità e interazione sicura con l’ambiente e con il corpo umano.