Il robot innovativo di perforazione dell’Unione europea BADGER può navigare nelle gallerie urbane sotterranee e 3D
 Poiché la robotica è sempre più avanzata, vediamo la tecnologia utilizzata in modi interessanti, spesso in alcuni luoghi inaspettati. Un nuovo progetto di robotica conosciuto come BADGER (un acronimo un po ‘scomodo per “roBot per operazioni opzionali, mappatura e navigazione autonomi UnDerGround”) è stato sviluppato dall’Unione Europea. Il robot è stato progettato per essere utilizzato nei cantieri, per scavare trincee e gallerie sotterranee nonché per navigare in infrastrutture esistenti. La tecnologia in questione è qualcosa di noioso, nonostante sia una delle sue principali funzioni, e il BADGER è anche in grado di stampare muri in 3D mentre si muove.
Poiché la robotica è sempre più avanzata, vediamo la tecnologia utilizzata in modi interessanti, spesso in alcuni luoghi inaspettati. Un nuovo progetto di robotica conosciuto come BADGER (un acronimo un po ‘scomodo per “roBot per operazioni opzionali, mappatura e navigazione autonomi UnDerGround”) è stato sviluppato dall’Unione Europea. Il robot è stato progettato per essere utilizzato nei cantieri, per scavare trincee e gallerie sotterranee nonché per navigare in infrastrutture esistenti. La tecnologia in questione è qualcosa di noioso, nonostante sia una delle sue principali funzioni, e il BADGER è anche in grado di stampare muri in 3D mentre si muove.
Il progetto BADGER attualmente coinvolge la partecipazione di sette diverse istituzioni, provenienti da cinque paesi europei. È coordinato dal professor Carlos Balaguer, Santiago Martínez de la Casa e Carme de Andrés Sanchis del RoboticsLab presso l’Università Carlos III di Madrid. Il progetto è iniziato questo gennaio ed è stato finanziato per 3,7 milioni di euro nei prossimi tre anni.
Il BADGER funzionerà integrando una serie di tecnologie all’avanguardia, consentendo di realizzare progetti di costruzione più efficienti, dalle costruzioni senza tralicci al cablaggio e alle installazioni di tubazioni, alle indagini geotecniche, alle installazioni di irrigazione su larga scala, alle operazioni di ricerca e salvataggio, alla scienza in remoto Ed esplorazione e applicazioni di difesa. Il progetto di collaborazione contribuisce anche all’avanzamento generale di questo tipo di tecnologia robotica.
Molti cantieri già utilizzano impianti di perforazione su larga scala per scavi e installazione di tubi e cavi, ma tendono ad essere piuttosto basilari e limitati in termini di navigazione. L’input umano è obbligatorio per mantenere la macchina in funzione che generalmente si muove solo in linee rette. Una macchina perforatrice completamente autonoma e programmabile con una vasta gamma di possibili movimenti sarebbe quindi incredibilmente utile.
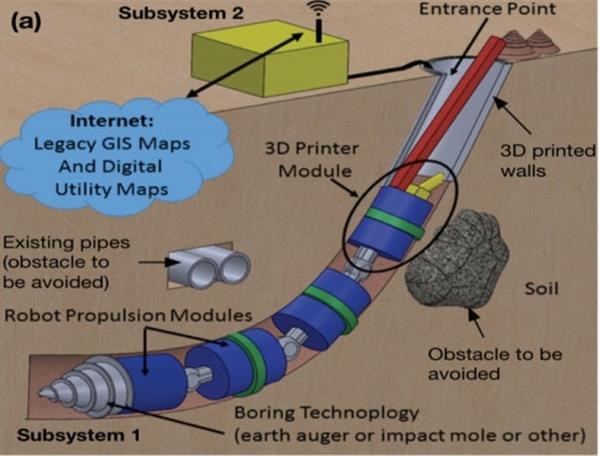
Il design del BADGER è modulare, in modo che varie componenti possano essere scambiate dentro e fuori a seconda di quale tipo di attività sia richiesta. L’idea generale è che il robot sia programmato per scavare nel sottosuolo, che fa con un moto peristaltico e senza fine, per creare reti tunnel orizzontali e verticali per svariate fasi di costruzione. Ha una testa di trapano speciale per polverizzare la roccia davanti a essa, che viene poi risucchiata e scaricata dalla parte posteriore del robot. I laser e altri tipi di sensori di navigazione elettronica vengono utilizzati per tracciare il percorso del BADGER e tenerlo lontano da eventuali ostacoli.
L’integrazione della tecnologia di stampa 3D permetterà che i tunnel siano supportati in quanto formati dal BADGER burrowing. Il modulo stampante 3D creerà rapidamente pareti mentre il robot si muove , per mantenere il condotto aperto e accessibile ad altri strumenti o attrezzature che potrebbero essere necessari .
Il robot farà uso di concetti innovativi meccatronici con robusti perforatori industriali, per offrire una manovrabilità avanzata e una capacità di movimento. Integrerà anche tecniche di percezione, localizzazione e mappatura per sensibilizzare, mappare e interpretare l’ambiente sotterraneo circostante. Il software del sistema fonderà i dati raccolti sotterranei con mappe digitali legacy per pianificare e monitorare il movimento del robot rispetto ai punti fisici fisici.
Per quanto riguarda le azioni e le reazioni del sistema robotico, verranno governati da un componente di cognizione appositamente progettato, che prende decisioni sull’esecuzione delle attività, sulla pianificazione del percorso e sulla pianificazione del movimento. Infine, il sistema robotico sarà in grado di gestire e combinare in modo intelligente i massicci dati raccolti durante il funzionamento sotterraneo in modo da migliorare continuamente le proprie capacità di percezione e cognizione, fornendo agli utenti anche i mezzi per memorizzare, elaborare e analizzare questi dati. Ciò sarà particolarmente utile per migliorare la gestione del tempo e la pianificazione dei compiti.