Il MIT ha sviluppato una mano robotica che può identificare gli oggetti con una sola presa grazie alla sua capacità di “sentire” con grande sensibilità lungo l’intera lunghezza di ogni dito, non solo sulla punta. Questo è possibile grazie alla presenza di potenti sensori ad alta risoluzione incorporati sotto la “pelle” trasparente di un dito robotico morbido-rigido.
La mano robotica può identificare gli oggetti dopo una sola presa, con una precisione dell’85%. Lo scheletro rigido rende le dita abbastanza forti da raccogliere un oggetto pesante, come un trapano, mentre la pelle morbida consente loro di afferrare saldamente un oggetto flessibile, come una bottiglia d’acqua di plastica vuota, senza schiacciarlo.
La mano robotica a tre dita potrebbe essere particolarmente utile in un robot per l’assistenza domiciliare progettato per interagire con un individuo anziano, potendo sollevare un oggetto pesante da uno scaffale con la stessa mano che usa per aiutare l’individuo a fare il bagno.
La mano robotica è stata sviluppata ispirandosi alla mano umana. Il dito robotico è costituito da un endoscheletro rigido stampato in 3D che viene inserito in uno stampo e racchiuso in una “pelle” di silicone trasparente. L’endoscheletro di ogni dito contiene una coppia di sensori tattili dettagliati, noti come sensori GelSight, incorporati nelle sezioni superiore e centrale, sotto la pelle trasparente. I sensori utilizzano una fotocamera e LED per raccogliere informazioni visive sulla forma di un oggetto, fornendo un rilevamento continuo lungo l’intera lunghezza del dito.
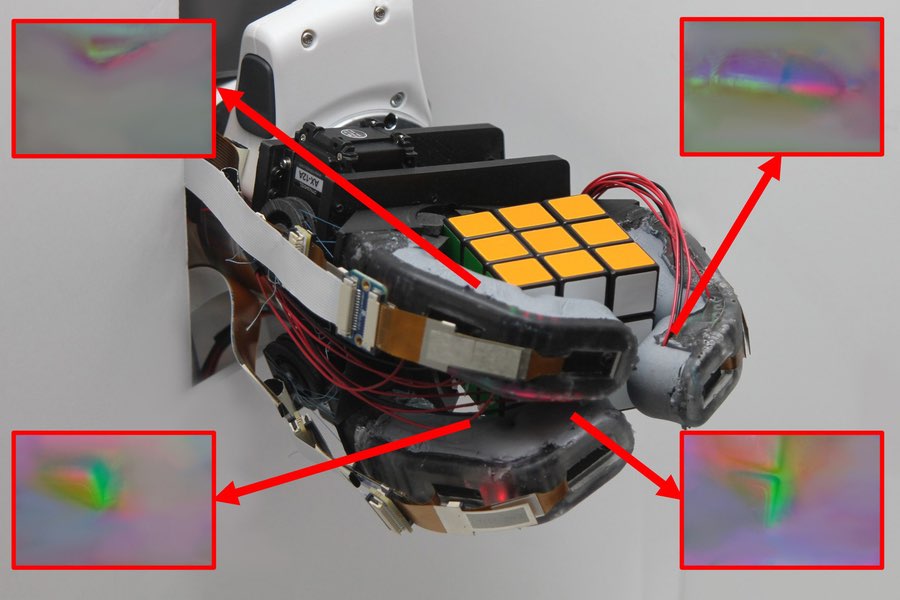
Il sensore GelSight è composto da una fotocamera e tre LED colorati. Quando il dito afferra un oggetto, la fotocamera cattura le immagini mentre i LED colorati illuminano la pelle dall’interno. Utilizzando i contorni illuminati che appaiono nella pelle morbida, un algoritmo esegue calcoli all’indietro per mappare i contorni sulla superficie dell’oggetto afferrato. I ricercatori hanno addestrato un modello di apprendimento automatico per identificare gli oggetti utilizzando i dati delle immagini grezze della fotocamera.
Una volta perfezionato il design, i ricercatori hanno costruito una mano robotica a tre dita in grado di identificare gli oggetti dopo una sola presa. La mano acquisisce sei immagini quando afferra un oggetto (due per ogni dito) e le invia a un algoritmo di apprendimento automatico che le utilizza come input per identificare l’oggetto.
In futuro, i ricercatori vogliono migliorare l’hardware per ridurre la quantità di usura del silicone nel tempo e aggiungere più azionamento al pollice in modo che possa eseguire una più ampia varietà di attività.
Utilizzando questo progetto, i ricercatori hanno costruito una mano robotica a tre dita in grado di identificare gli oggetti dopo una sola presa, con una precisione di circa l’85%. Lo scheletro rigido rende le dita abbastanza forti da raccogliere un oggetto pesante, come un trapano, mentre la pelle morbida consente loro di afferrare saldamente un oggetto flessibile, come una bottiglia d’acqua di plastica vuota, senza schiacciarlo.
Le dita morbide e rigide potrebbero essere particolarmente utili in un robot per l’assistenza domiciliare progettato per interagire con un individuo anziano. Il robot potrebbe sollevare un oggetto pesante da uno scaffale con la stessa mano che usa per aiutare l’individuo a fare il bagno.
Il dito robotico è stato costruito con ispirazione umana e, in futuro, i ricercatori vogliono migliorare l’hardware per ridurre la quantità di usura del silicone nel tempo e aggiungere più azionamento al pollice in modo che possa eseguire una più ampia varietà di attività. Il lavoro è stato sostenuto, in parte, dal Toyota Research Institute, dall’Office of Naval Research e dal progetto SINTEF BIFROST.