I ricercatori hanno progettato una mano robotica a basso costo ed efficienza energetica in grado di afferrare una serie di oggetti – e non lasciarli cadere – usando solo il movimento del polso e la sensazione nella sua “pelle”.
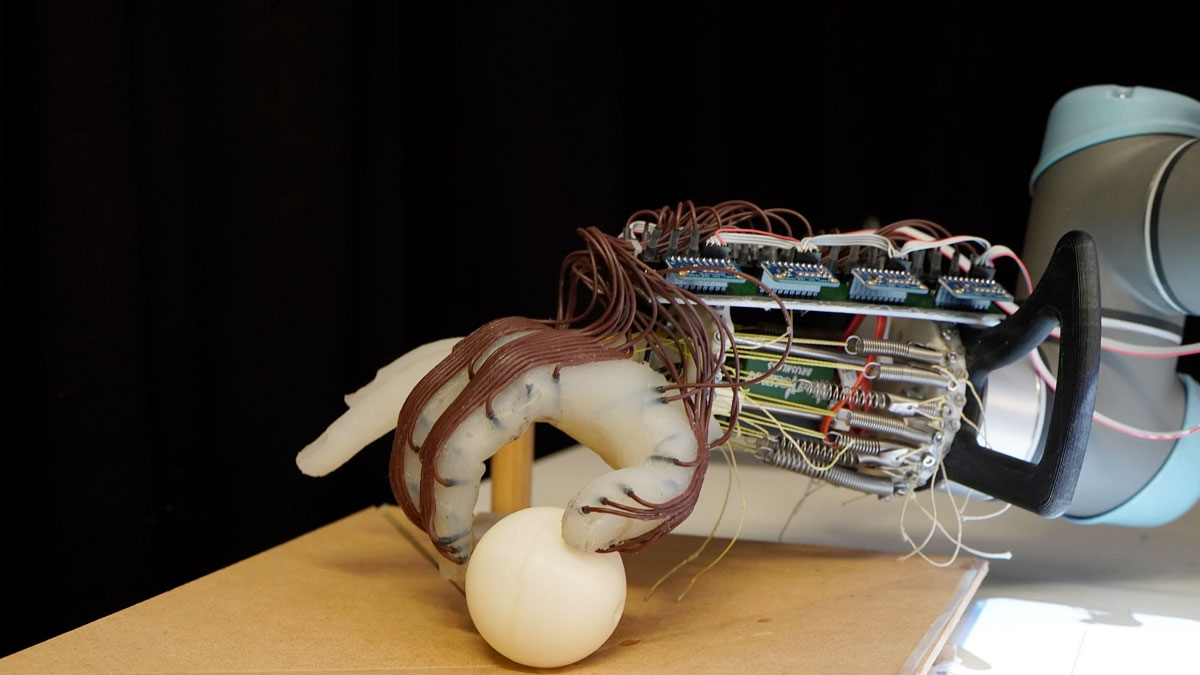
Afferrare oggetti di diverse dimensioni, forme e trame è un problema facile per un essere umano, ma impegnativo per un robot. I ricercatori dell’Università di Cambridge hanno progettato una mano robotica morbida stampata in 3D che non può muovere autonomamente le dita ma può comunque eseguire una serie di movimenti complessi.
La mano del robot è stata addestrata ad afferrare diversi oggetti ed è stata in grado di prevedere se li avrebbe lasciati cadere utilizzando le informazioni fornite dai sensori posizionati sulla sua “pelle”.
Questo tipo di movimento passivo rende il robot molto più facile da controllare e molto più efficiente dal punto di vista energetico rispetto ai robot con dita completamente motorizzate. I ricercatori dicono Il loro design adattabile potrebbe essere utilizzato nello sviluppo di robot a basso costo che sono in grado di muoversi in modo più naturale e possono imparare ad afferrare una vasta gamma di oggetti. Le risultati sono riportati nella rivista Sistemi intelligenti avanzati.
Nel mondo naturale, il movimento deriva dall’interazione tra cervello e corpo: ciò consente alle persone e agli animali di muoversi in modi complessi senza spendere inutili quantità di energia. Negli ultimi anni, i componenti morbidi hanno iniziato a essere integrati nella progettazione robotica grazie ai progressi nelle tecniche di stampa 3D, che hanno permesso ai ricercatori di aggiungere complessità a sistemi semplici ed efficienti dal punto di vista energetico.
La mano umana è molto complessa e ricreare tutta la sua destrezza e adattabilità in un robot è una sfida di ricerca enorme. La maggior parte dei robot avanzati di oggi non sono in grado di manipolare compiti che i bambini piccoli possono eseguire con facilità. Ad esempio, gli umani sanno istintivamente quanta forza usare quando raccolgono un uovo, ma per un robot, questa è una sfida: troppa forza e l’uovo potrebbe frantumarsi; troppo poco, e il robot potrebbe lasciarlo cadere. Inoltre, una mano robotica completamente azionata, con motori per ogni articolazione in ogni dito, richiede una quantità significativa di energia.
Nel libro del professor Fumiya Iida Laboratorio di Robotica Bio-Ispirata Nel Dipartimento di Ingegneria di Cambridge, i ricercatori hanno sviluppato potenziali soluzioni a entrambi i problemi: una mano robotica in grado di afferrare una varietà di oggetti con la giusta quantità di pressione utilizzando una quantità minima di energia.
“In Esperimenti precedenti, il nostro laboratorio ha dimostrato che è possibile ottenere una gamma significativa di movimenti in una mano robotica semplicemente muovendo il polso”, ha detto il co-autore Dr Thomas George-Thuruthel, che ora ha sede presso l’University College London (UCL). A est. “Volevamo vedere se una mano robotica basata sul movimento passivo non solo potesse afferrare gli oggetti, ma sarebbe stata in grado di prevedere se avrebbe lasciato cadere gli oggetti o meno, e adattarsi di conseguenza..”
I ricercatori hanno utilizzato una mano antropomorfa stampata in 3D impiantata con sensori tattili, in modo che la mano potesse percepire ciò che stava toccando. La mano era in grado di eseguire solo movimenti passivi basati sul polso.
Il team ha effettuato più di 1200 test con la mano robotica, osservando la sua capacità di afferrare piccoli oggetti senza farli cadere. Il robot è stato inizialmente addestrato utilizzando piccole sfere di plastica stampate in 3D e le ha afferrate utilizzando un’azione predefinita ottenuta attraverso dimostrazioni umane.
“Questo tipo di mano ha un po’ di elasticità: può raccogliere le cose da solo senza alcuna azione delle dita”, ha detto il primo autore Dr Kieran Gilday, che ora lavora presso l’EPFL a Losanna, in Svizzera. “I sensori tattili danno al robot un’idea di quanto bene stia andando la presa, in modo che sappia quando sta iniziando a scivolare. Questo lo aiuta a prevedere quando le cose falliranno”.
Il robot ha usato tentativi ed errori per imparare che tipo di presa avrebbe avuto successo. Dopo aver terminato l’allenamento con le palline, ha poi tentato di afferrare diversi oggetti tra cui una pesca, un mouse per computer e un rotolo di pluriball. In questi test, la mano è stata in grado di afferrare con successo 11 dei 14 oggetti.
“I sensori, che sono un po ‘come la pelle del robot, misurano la pressione applicata all’oggetto”, ha detto George-Thuruthel. “Non possiamo dire esattamente quali informazioni sta ricevendo il robot, ma può teoricamente stimare dove l’oggetto è stato afferrato e con quanta forza”.
“Il robot impara che una combinazione di un particolare movimento e un particolare insieme di dati del sensore porterà al guasto, il che lo rende una soluzione personalizzabile”, ha affermato Gilday. “La mano è molto semplice, ma può raccogliere molti oggetti con la stessa strategia.”
“Il grande vantaggio di questo design è la gamma di movimento che possiamo ottenere senza utilizzare attuatori”, ha detto Iida. “Vogliamo semplificare il più possibile la mano. Possiamo ottenere molte buone informazioni e un alto grado di controllo senza attuatori, in modo che quando li aggiungiamo, otterremo un comportamento più complesso in un pacchetto più efficiente”.
Una mano robotica completamente azionata, oltre alla quantità di energia che richiede, è anche un problema di controllo complesso. Il design passivo della mano progettata da Cambridge, utilizzando un piccolo numero di sensori, è più facile da controllare, fornisce un’ampia gamma di movimenti e semplifica il processo di apprendimento.
In futuro, il sistema potrebbe essere ampliato in diversi modi, ad esempio aggiungendo funzionalità di visione artificiale o insegnando al robot a sfruttare il suo ambiente, che gli consentirebbe di afferrare una gamma più ampia di oggetti.
Questo lavoro è stato finanziato da UK Research and Innovation (UKRI) e Arm Ltd. Fumiya Iida è membro del Corpus Christi College di Cambridge.