RICERCATORI SVEDESI CON SUCCESSO NELLA STAMPA 4D DI ROBOT MORBIDI SU SCALA MICRON
Un team di ricercatori dell’Università di Linköping , in Svezia, ha sviluppato una serie di microattuatori per la micro robotica morbida utilizzando una stampante 3D basata su estrusione personalizzata. Gli attuatori contengono un polimero elettricamente attivo che cambia forma – dopo essere stato stampato – in presenza di una carica elettrica, garantendo loro capacità 4D.
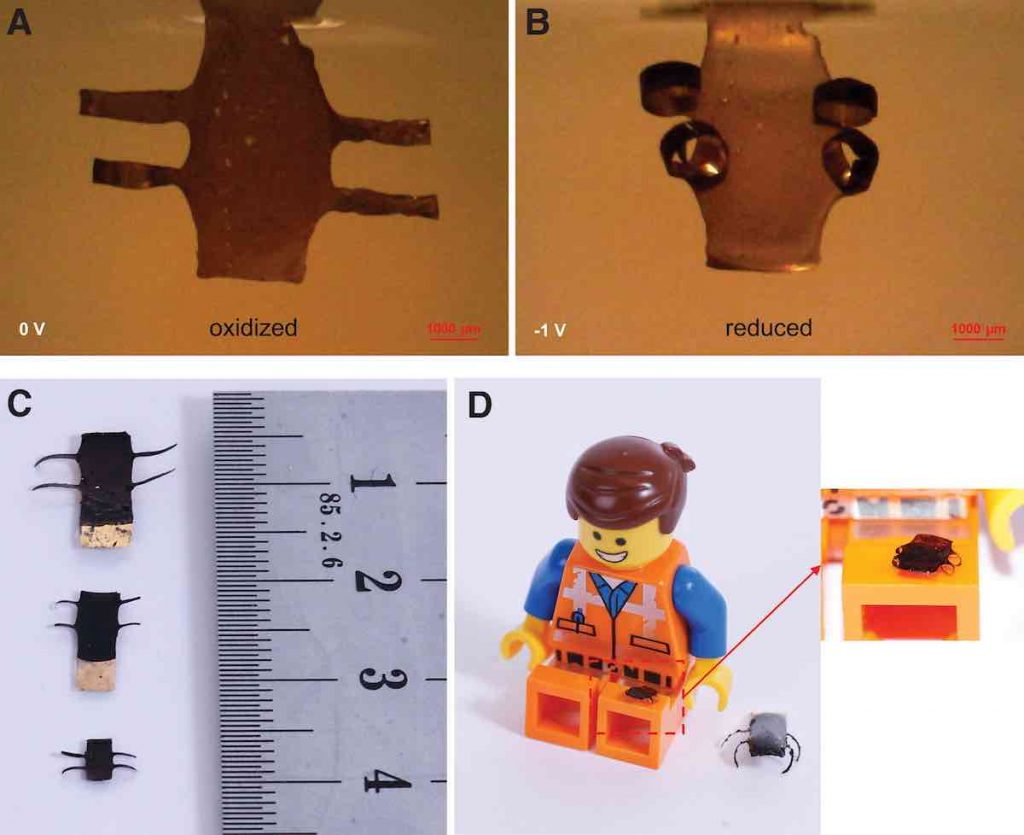
Mentre i robot morbidi stampati in 4D sono solitamente limitati alla scala dei centesimi o dei milli, la tecnologia appositamente sviluppata ha permesso ai ricercatori di ridurre i loro meccanismi di attuazione al dominio dei micron, con spessori nella regione di circa 20 micron. Affermano che la loro macchina personalizzata è versatile e scalabile e si aspettano di “ampliare la portata della robotica morbida” con microrobot complessi inediti.
I più piccoli micro-robot stampati in 4D. Foto via Linköping University.
I più piccoli micro-robot stampati in 4D. Foto via Linköping University.
Tecnologia polimerica elettroattiva
La tecnologia dei polimeri elettroattivi (EAP) è la forza trainante di molti dispositivi robotici morbidi. Descrive i materiali che si attivano o si attivano quando sottoposti a una carica elettrica. Nei robot morbidi, questo è paragonabile a una contrazione muscolare (e spesso assomiglia a una).
Secondo i ricercatori, il tentativo di ridimensionare gli attuatori EAP spesso incontra una montagna di sfide. Le tecniche di microfabbricazione come la fotolitografia sono in grado di consentire potenziali di attuazione inferiori e rapporti potenza-peso più elevati, ma tendono a comportare elaborazioni complicate. Ciò rende difficile integrarli con i mercati e le tecnologie attuali.
È qui che la produzione additiva offre una pletora di vantaggi, poiché i prodotti possono essere modificati al volo, i costi energetici possono essere ridotti in modo significativo e la produzione di rifiuti può essere ridotta di dieci volte. In definitiva, il team ritiene che ciò possa rendere i dispositivi EAP più economici e fattibili per una gamma più ampia di applicazioni.
Microattuatori stampati 4D
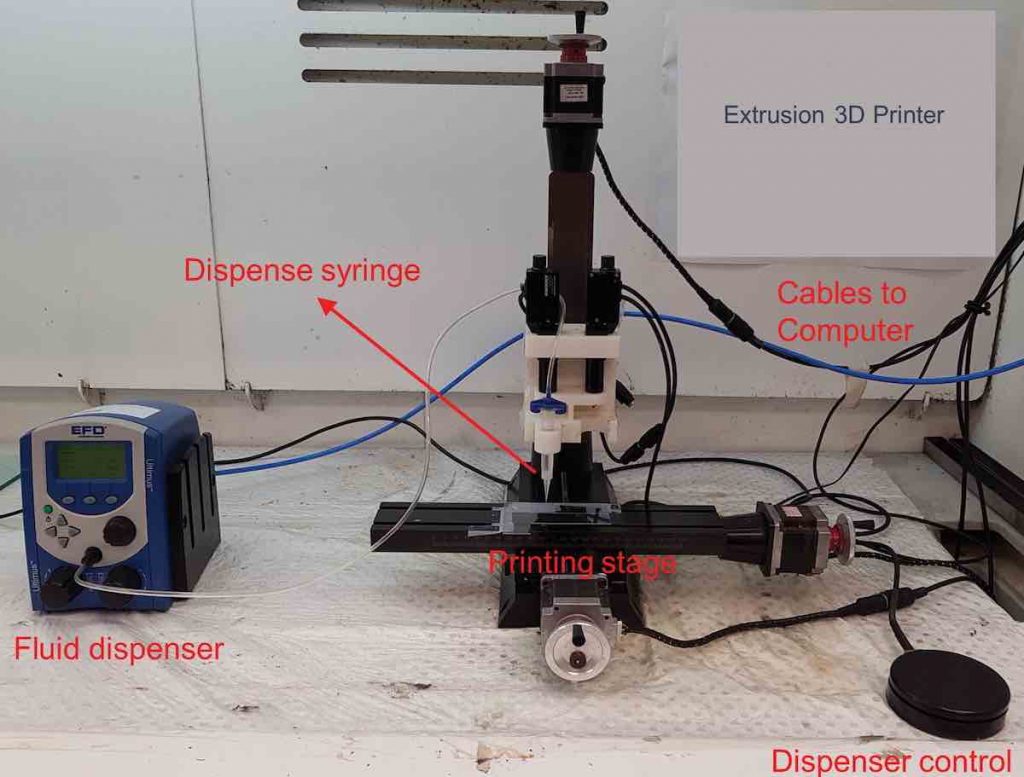
La prima fase dello studio ha comportato la costruzione della stampante. La base della macchina era uno stadio CNC programmabile a tre assi equipaggiato con un sistema di erogazione del fluido ad alta precisione. Al sistema di erogazione era collegata una siringa con blocco da 5 ml, per cui la velocità di estrusione era controllata dal movimento laterale del tavolino. Il team ha utilizzato un vetrino disponibile in commercio come piastra di costruzione.
Per prima cosa hanno posizionato un sottile strato d’oro, a soli 40 nm di spessore, sul vetrino per formare uno strato conduttivo. I ricercatori hanno quindi utilizzato la siringa per erogare un singolo strato di gel di acrilato di uretano induribile ai raggi UV sullo strato conduttivo. Il gel andrebbe a formare il “corpo e le braccia” del microattuatore. Una volta che il gel si è completamente polimerizzato sotto la luce UV, il team ha depositato uno strato di polipirrolo (l’EAP) sull’altro lato del foglio d’oro.
La stampante 3D personalizzata. Foto via Linköping University.
La stampante 3D personalizzata. Foto via Linköping University.
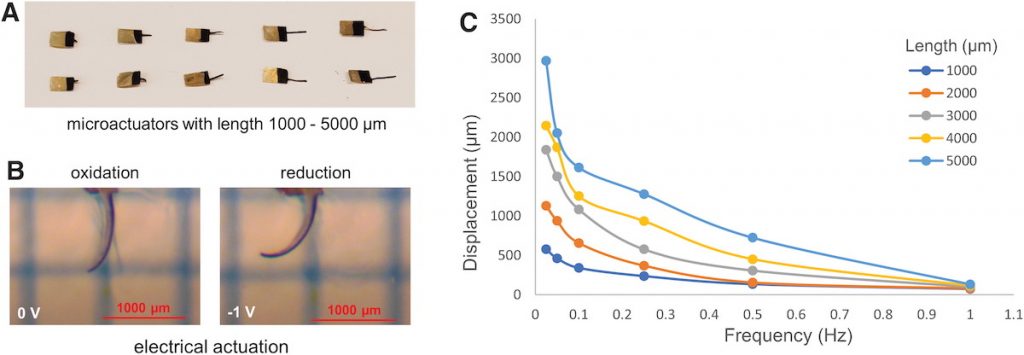
Il team è riuscito a ripetere questo processo più volte, stampando microattuatori con lunghezze che vanno da 5000 micron fino a 1000 micron. Il microattuatore più sottile che hanno sviluppato aveva uno spessore di soli 20 micron. I ricercatori hanno scoperto che potevano attivare i dispositivi con potenziali elettrici fino a 1 V, rispetto al tipico 1kV + per altri metodi di stampa 3D. Gli scienziati ritengono che il loro lavoro mostri un grande potenziale per la miniaturizzazione della micro robotica a basso costo sviluppata tramite la tecnologia di stampa 3D.
Azionamento con un minimo di 1V. Immagine via Linköping University.
Azionamento con un minimo di 1V. Immagine via Linköping University.
Ulteriori dettagli dello studio possono essere trovati nel documento intitolato ” Microattuatori di stampa 3D per microrobot morbidi “. È co-autore di Manav Tyagi , Geoffrey M. Spinks e Edwin WH Jager.
Esistono diversi metodi di attuazione quando si tratta di robot soft stampati in 4D: l’attivazione elettrica è uno di questi. I ricercatori della Rice University hanno recentemente stampato i propri robot morbidi che vengono attivati dai cambiamenti di temperatura . Intendono sviluppare la tecnologia al punto da poter essere utilizzata negli impianti biomedici che si riconfigurano su richiesta.
Altrove, alla Nanyang Technological University , i ricercatori hanno fatto un ulteriore passo avanti e hanno stampato robot soft che non richiedono alcun input umano in tempo reale. Il processo prevede il rigonfiamento di un elastomero con etanolo per indurre stress nella struttura dell’attuatore. Quando l’etanolo evapora da solo e l’elastomero si asciuga, il materiale viene deformato dall’energia elastica intrinsecamente immagazzinata in esso.