I ricercatori cinesi sono stati ispirati dalle strutture e dai materiali degli origami, portandoli allo sviluppo più complesso della robotica, come presentato nel recente pubblicato ” Metamateriali e robot ispirati alla primavera Origami: un tentativo di robotica completamente programmabile “.
Non è la prima volta che vediamo lavori ispirati agli origami, da strumenti chirurgici innovativi ad applicazioni espandibili per ingegneria , antenne e persino robot pieghevoli . Andando ben oltre l’arte di piegare carte delicate, in questo studio i ricercatori hanno cercato di programmare i materiali in un sistema robotico. Ciò significava esaminare non solo la stampabilità 3D, ma anche la piegabilità e le proprietà meccaniche richieste.
“Oltre agli approcci meccanici, l’arte dell’origami viene ora accettata come ispirazione intuitiva e fertile per la progettazione meccanica dei metamateriali grazie alla sua pieghevolezza, dispiegabilità, flessibilità, geometria senza scala e riconfigurazione programmabile”, hanno spiegato i ricercatori, osservando che la ricerca precedente ha prodotto robot miniaturizzati, robot morbidi, robot ingeribili per attività mediche, moduli conformi, dispositivi medici, pinze e altro ancora.
Il team ha iniziato con una molla origami pieghevole, quindi è passato ai personaggi metamateriali, esplorando le proprietà derivate dalle geometrie che si piegano. In definitiva, il loro prototipo era in grado di eseguire la scansione a causa dei materiali stampati in 3D che collassavano secondo necessità.
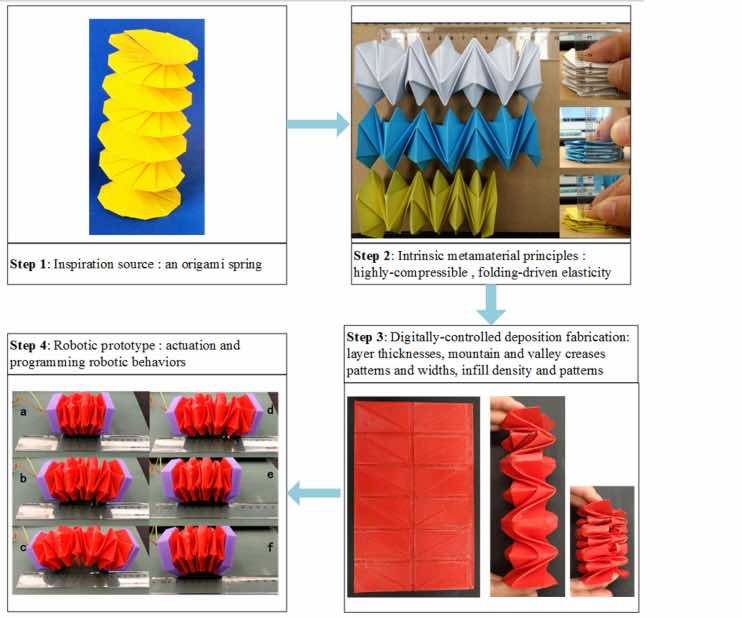
Diagramma di flusso per trasformare un modello origami in un sistema robotico completamente programmabile.
La molla pieghevole è stata ispirata da un rettangolo di carta piegato e attorcigliato con triangoli rettangoli uniformi.
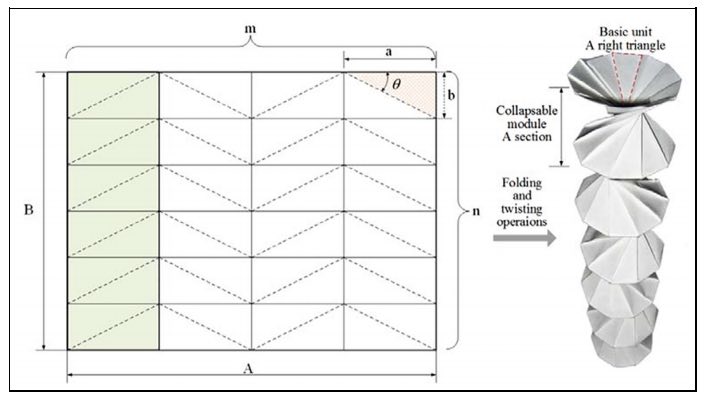
La geometria della carta balza da una piega a una forma a spirale.
“Dalla vista dall’alto, quando la molla di carta viene dispiegata, la larghezza della molla si restringe a spirale e le aree di sovrapposizione tra le ventole aumentano fino alla completa sovrapposizione nello stato massimo dispiegabile”, hanno spiegato i ricercatori.
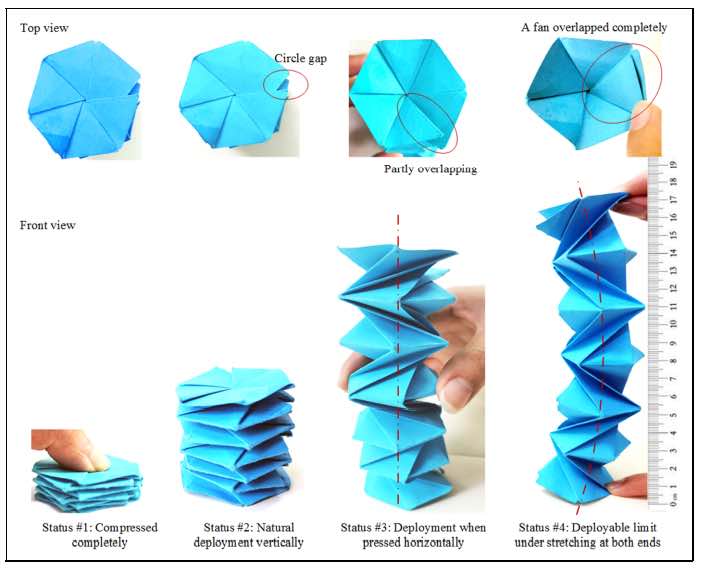
Meccanismi metamateriali intrinseci della molla di carta pieghevole: (a) stato # 1– # 2: compressibilità altamente reversibile, (b) stato # 2– # 3: buona commutazione tra compressione trasversale ed estensibilità longitudinale, e (c) stato # 4: distribuzione curvilinea.
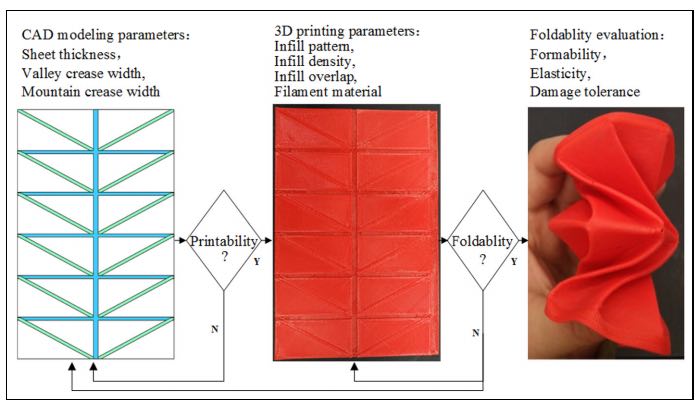
Diagramma di flusso di fabbricazione digitale di metamateriali primaverili ispirati agli origami.
Utilizzando la loro stampante 3D personalizzata, PLA e un ugello FDM da 0,3 mm, sono stati in grado di “elaborare digitalmente i metamateriali primaverili ispirati agli origami”. Sono stati in grado di creare una pinza morbida che si è dimostrata “completamente stampabile in 3D” e utile per raccogliere oggetti con forme più irregolari.
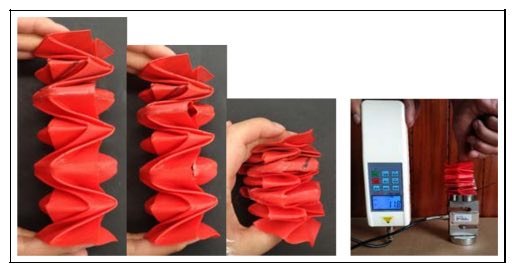
Metamateriali primaverili ispirati agli origami e loro elasticità.
Nel complesso, il team è stato in grado di utilizzare la stampa 3D come metodo di controllo programmabile, con le proprietà meccaniche richieste, superando qualsiasi ostacolo relativo alla stampabilità, alla piegabilità e alla necessità di una migliore tolleranza ai danni. Sono stati fabbricati con successo due tipi di robot morbidi, incluso il loro “robot strisciante”.

Un manipolatore completamente morbido con un braccio comprimibile altamente reversibile: (a) braccio robotico completamente morbido con una pinza a tre dita. (b) Preleva e posiziona un cartone. (c) Scegli e posiziona un sacchetto di plastica
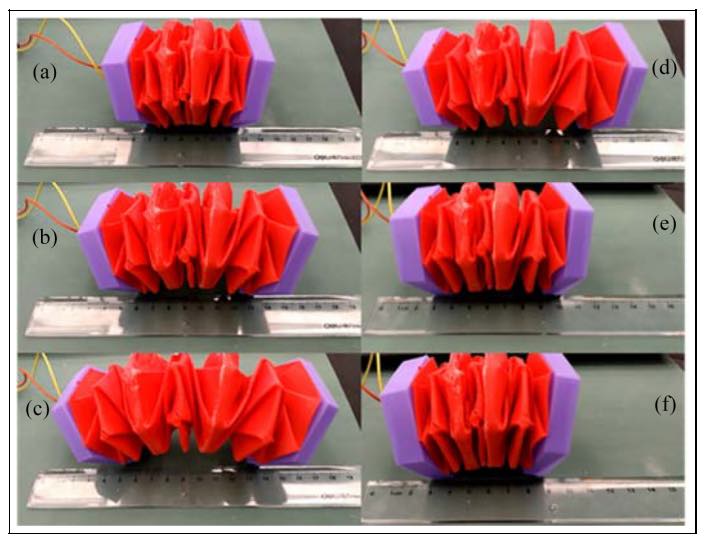
Un robot strisciante peristaltico con movimenti ondulatori indotti dal dispiegamento curvilineo. (a) stato completamente compresso; (b) stato di allungamento; (c) distribuzione completamente curvilinea; (d) iniziare a comprimere; (e) compressione sate; e (e) stato completamente compresso