I RICERCATORI PUBBLICANO UN DESIGN OPEN SOURCE A BASSO COSTO PER IL CANE ROBOT STAMPATO IN 3D
I ricercatori della Tandon School of Engineering della NYU e del Max Planck Institute for Intelligent Systems (MPI-IS) di Tubinga e Stoccarda, Germania, hanno progettato e stampato in 3D un cane robot quadruplo di provenienza aperta chiamato “Solo 8.”
Rispetto al prezzo di Boston Dynamics, il cane automatizzato ha un costo relativamente basso ed è facile e veloce da montare secondo il team. Il cane robot open-source può essere aggiornato e modificato facilmente. Ciò potrebbe consentire ai team di ricerca e sviluppo con budget limitati, compresi quelli di startup, laboratori più piccoli o istituti di insegnamento, di innovare e migliorare la progettazione meccanica di animali domestici in futuro.
“Affinché un gruppo di ricerca sviluppi un robot di questo tipo, ci vogliono facilmente quattro anni di lavoro”, ha affermato Alexander Badri-Spröwitz, leader del gruppo di ricerca sulla locomozione dinamica. “Inoltre, hai bisogno di una vasta gamma di competenze. La nostra piattaforma è la conoscenza combinata di diversi team. Ora qualsiasi laboratorio in tutto il mondo può andare online, scaricare i file e stampare le parti e acquistare i componenti rimanenti dal catalogo. E tutti possono aggiungere funzionalità extra, entro poche settimane. Fatto, ti sei procurato un robot di classe mondiale. “
Testare algoritmi avanzati di controllo e apprendimento utilizzando robot con gambe può richiedere notevoli sforzi di sviluppo hardware o costi di manutenzione. Molti sistemi esistenti non sono disponibili in commercio, il che li rende difficili da confrontare e talvolta molto costosi. Il cane robot creato dalla società di ingegneria Boston Dynamics, ad esempio, è recentemente diventato disponibile per l’acquisto per $ 74.500.
Al fine di supportare rapidi e ampi progressi nella ricerca, il team ha deciso che hardware, firmware e middleware necessari per diventare economici e relativamente facili da riprodurre e implementare. Rendere i progetti open source ha permesso che ciò accadesse, consentendo al contempo di confrontare più liberamente le specifiche robotiche tra i proprietari di cani stampati in 3D ovunque. Tuttavia, mentre progetti come “The Open Dog Project” e “Oncilla” hanno reso disponibili i loro progetti, pochissimi utilizzano anche una piattaforma robotizzata a gambe aperte a controllo di coppia.
Inoltre, mentre le parti di Solo 8 sono tagliate a getto d’acqua e relativamente facili da produrre, altri progetti open source utilizzano principalmente servomotori controllati dalla posizione, limitando le loro applicazioni nei test degli algoritmi di apprendimento. Gli strumenti complessi e i meccanismi complicati richiesti per alterare efficacemente la rigidità articolare di questi robot aggiungono ulteriori barriere all’accessibilità sia per gli appassionati che per i ricercatori. Di conseguenza, il team ha concluso che, al fine di rendere il proprio robot il più accessibile possibile, era necessario ridurre al minimo il numero di parti che richiedono una lavorazione di precisione e ha utilizzato la stampa 3D come alternativa.
Ciò ha permesso ai ricercatori di utilizzare la stampa 3D in plastica economica e motori DC brushless ad alte prestazioni (BLDC) per produrre parti. Inoltre, il team potrebbe trarre vantaggio dai sensori miniaturizzati convenienti, dalla bassa potenza e dai microcontrollori ad alte prestazioni e dalle tecnologie avanzate della batteria, consentite dai progressi nel mercato dei dispositivi mobili.
Nel complesso, il team di ricerca ha mirato a creare un cane robot leggero perché sono particolarmente rilevanti quando testano algoritmi avanzati per la locomozione dinamica e agiscono per accelerare i cicli di test. Inoltre, i robot leggeri non richiedono la costruzione di gru o strutture guida e possono essere gestiti da un singolo ricercatore in spazi di laboratorio più piccoli. Queste funzionalità sono importanti quando si tratta di testare algoritmi di apprendimento direttamente su hardware reale, in modo rapido, sicuro e conveniente. Usando questa metodologia, il team ha creato Solo 8, un romanzo cane completamente open source e robotizzato con architettura modulare della gamba controllata dalla forza, che secondo quanto riferito è possibile costruire per $ 4.500 o meno.
Il modulo attuatore del cane robot è costituito da un motore brushless, trasmissione a cinghia di distribuzione a doppio stadio 9: 1, un encoder ottico ad alta risoluzione e una ruota con codice di 5000 conteggi per giro montata direttamente sull’albero del motore. Questi moduli sono fondamentali per la progettazione del bot, secondo Felix Grimminger, un ingegnere meccatronico di Max Planck. “Era importante farlo bene. L’attuatore centrale è come il blocco base che riutilizziamo continuamente con piccole variazioni ”, ha affermato. “In questo modo possiamo costruire uno zoo di robot.”
Due moduli attuatori sono stati combinati per creare ciascuno dei suoi arti e i suoi piedi sono stati montati distalmente, all’estremità della parte inferiore della gamba. Le articolazioni del robot si sono dimostrate in grado di girare a più giri e il robot completato è stato assemblato da quattro gambe identiche e una struttura del corpo stampata in 3D. Con un peso di 2,2 kg, una lunghezza del corpo di 42 cm e una larghezza di 33 cm, il cucciolo di robot poteva essere controllato tramite comunicazione cablata tramite TI e schede elettroniche personalizzate o in modalità wireless tramite interfacce di rete WiFi. All’interno del prodotto finito, tutto era contenuto in un guscio stampato in 3D e nessun cablaggio è stato lasciato esposto. Inoltre, l’assemblaggio del modulo era semplice, richiedeva pochissime parti separate e i componenti erano stampati in 3D o disponibili dallo scaffale, ad eccezione dell’albero motore e delle pulegge, che erano stati lavorati.
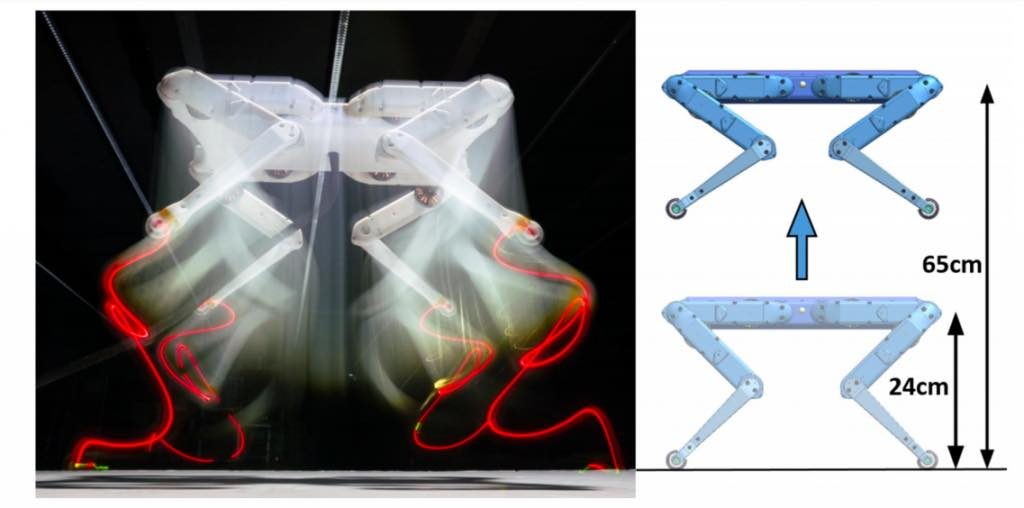
I test hanno dimostrato che la funzionalità di Solo 8, inclusi motori a controllo di coppia e giunti azionati, gli ha permesso di comportarsi come i suoi concorrenti bionici più costosi. Il cane robot del team, ad esempio, è in grado di eseguire azioni di salto, camminare in più configurazioni o direzioni e recuperare orientamento, postura e stabilità dopo essere stato rovesciato. Inoltre, il robot ha fornito un rapporto peso / potenza molto elevato, consentendogli di saltare in aria fino a 65 cm da un’altezza iniziale di 24 cm.
I comportamenti avanzati del cane canino possono essere di beneficio alla comunità della robotica, abbassando la barriera all’ingresso e portando a ulteriori estensioni dei robot additivi. Modifiche future potrebbero inoltre consentire al bot di manipolare l’ambiente e integrare anche tecnologie di comunicazione avanzate come il 5G. Le università si stanno già avvicinando ai ricercatori della NYU Tandon, volendo fare una copia del loro robot a fini di ricerca, secondo Ludovic Righetti, professore associato alla NYU Tandon.
“Già molte università ci hanno contattato e desiderano fare una copia del nostro robot e utilizzarlo come piattaforma di ricerca”, ha affermato Righetti. “La nostra piattaforma robotica è un’ottima base per prototipare e costruire rapidamente hardware ad alte prestazioni. In cambio, ne beneficiamo perché altri ricercatori possono contribuire al progetto; ad esempio colleghi del LAAS-CNRS in Francia, hanno sviluppato una scheda elettronica per aiutare a comunicare con il robot tramite WiFi “.
Il prossimo passo per il team di ricerca è continuare a sviluppare la loro nuova versione Solo 12 del robot per cani. Con un totale di dodici attuatori, tre per gamba, i test iniziali hanno dimostrato che è ancora più versatile e in grado di mostrare una gamma più ampia di comportamenti complessi rispetto al suo predecessore.
Gli animali robotizzati stampati in 3D sono stati prodotti dai ricercatori per una serie di diverse applicazioni negli ultimi anni.
Gli ingegneri di robotica del Georgia Institute of Technology , ad esempio, hanno creato lo SlothBot per l’uso nel giardino botanico di Atlanta . Dotato di numerosi componenti stampati in 3D, il robot lento e ad alta efficienza energetica può indugiare sugli alberi per monitorare animali, piante e l’ambiente sottostante.
Gli scienziati della Florida Atlantic University (FAU) hanno utilizzato la stampa 3D, l’apprendimento profondo, l’intelligenza artificiale e la robotica per creare Astro, un cane robot intelligente . Utilizzando un sistema robotizzato quadruplo sviluppato da Boston Dynamics, il cucciolo androide è in grado di vedere, ascoltare e imparare.
I ricercatori del Computer Science and Artificial Intelligence Laboratory (CSAIL) del MIT hanno sviluppato un pesce robotico morbido chiamato SoFi, che è stato creato in parte utilizzando gomma siliconica stampata in 3D. Con il minimo rumore, il SoFi è progettato per nuotare in modo indipendente senza interrompere la vita marina.
I risultati dei ricercatori sono dettagliati nel loro articolo intitolato ” Un’architettura robot modulare controllata a coppia aperta per la ricerca della locomozione con le gambe “, pubblicato sulla rivista Lettere di robotica e automazione . Il rapporto è stato scritto da Felix Grimminger, Avadesh Meduri, Majid Khadiv, Julian Viereck, Manuel Wüthrich, Maximilien Naveau, Vincent Berenz, Steve Heim, Felix Widmaier, Thomas Flayols, Jonathan Fiene, Alexander Badri-Spröwitz e Ludovic Righetti.