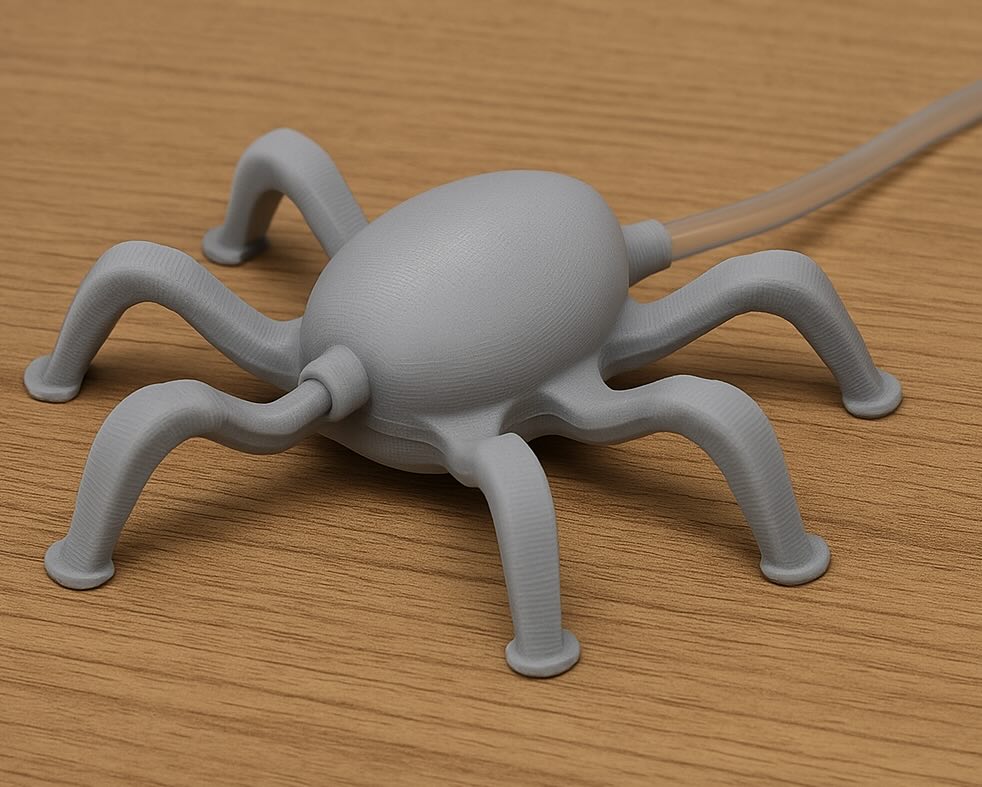
Un gruppo di ricerca dell’Università della California di San Diego ha progettato e realizzato un robot deambulante a sei arti utilizzando esclusivamente tecnologie di stampa 3D e materiali facilmente reperibili in commercio. L’aspetto più peculiare del progetto è che il robot funziona senza alcun componente elettronico: né motori elettrici, né circuiti stampati, né sensori digitali. L’intero sistema è invece alimentato e controllato attraverso un circuito pneumatico, azionato da aria compressa.
Un sistema meccanico ispirato alla robotica soffice soft robot
L’obiettivo del progetto era sviluppare una piattaforma robotica interamente realizzabile tramite stampa 3D, che potesse essere prodotta a basso costo, risultasse resistente a condizioni ambientali difficili e non richiedesse dispositivi elettronici per il suo funzionamento.
Per raggiungere questo risultato, i ricercatori si sono affidati a un approccio legato alla robotica soffice, utilizzando attuatori pneumatici flessibili integrati nella struttura del robot stesso. Il cuore del funzionamento è costituito da un oscillatore pneumatico, un meccanismo che, attraverso l’alternanza dei flussi d’aria compressa, genera un movimento ciclico e ritmato.
Questo principio consente al robot di muovere tre zampe per volta, alternando le due metà del corpo in maniera simile a quella osservata in alcuni insetti. In questo modo, si ottiene una camminata stabile, adatta a muoversi su una varietà di superfici, comprese sabbia e erba sintetica. I test hanno dimostrato che il sistema può funzionare anche in ambienti sommersi.
Una piattaforma stampata in un unico processo
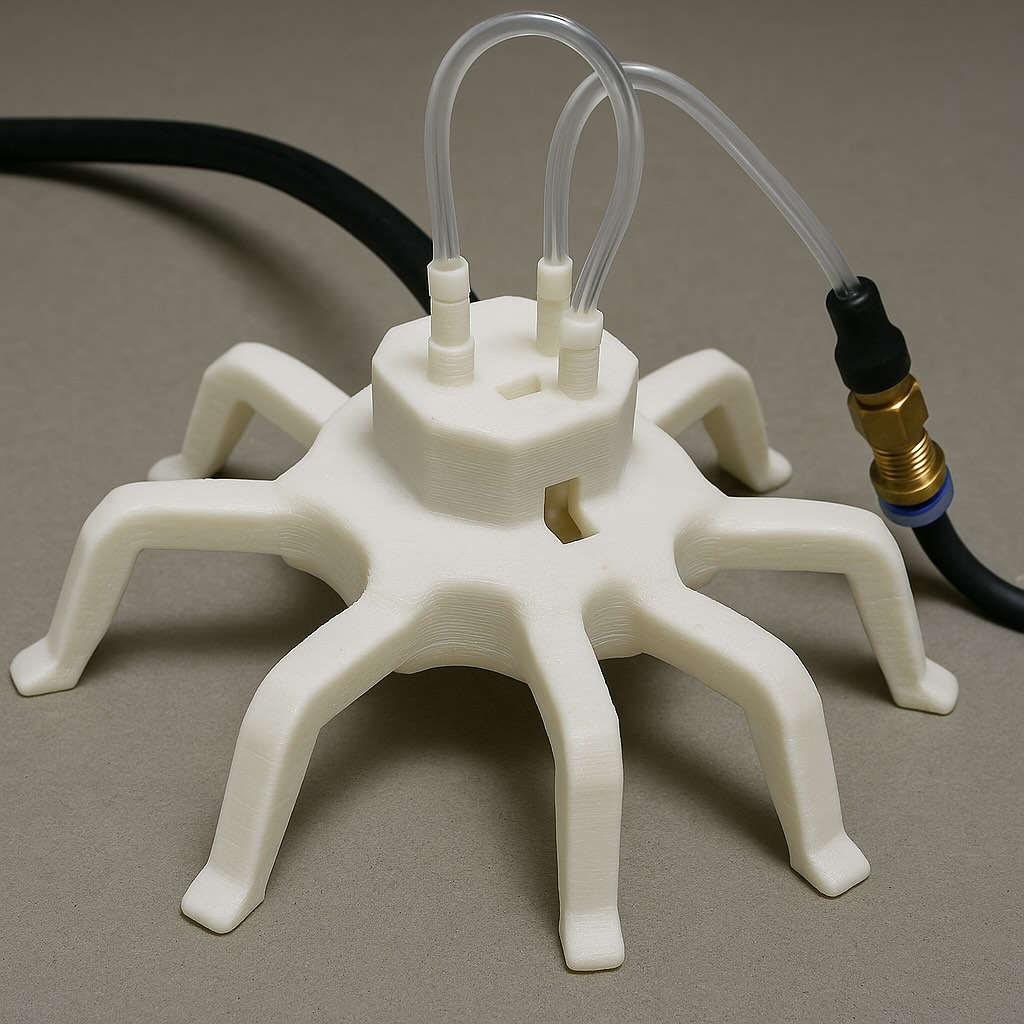
Tutti i componenti del robot, inclusi gli attuatori, il corpo centrale e il circuito pneumatico di controllo, sono stati realizzati attraverso un’unica sessione di stampa 3D con tecnologia FDM (Fused Deposition Modeling). I materiali utilizzati sono comuni termoplastici flessibili, disponibili sul mercato e compatibili con le stampanti 3D consumer.
L’approccio adottato riduce drasticamente la necessità di assemblaggi complessi o di parti specialistiche, rendendo il sistema potenzialmente adatto a essere replicato in laboratori o contesti con risorse limitate.
Autonomia e sviluppi futuri
Durante la fase di sperimentazione, il robot è stato collegato a una sorgente esterna di aria compressa. Tuttavia, per verificarne l’autonomia operativa in ambienti privi di alimentazione fissa, i ricercatori hanno testato anche l’uso di cartucce di gas compresso portatili, integrate direttamente nella struttura del robot. Questa soluzione ha permesso al sistema di funzionare in modalità autonoma, aprendo prospettive per un impiego sul campo.
Il gruppo di lavoro sta già pianificando una serie di evoluzioni progettuali. Tra gli sviluppi previsti ci sono l’aggiunta di sistemi di presa per la manipolazione di oggetti, l’integrazione di materiali riciclabili e la realizzazione di contenitori interni per il gas pressurizzato, al fine di migliorare l’autonomia e la compattezza del sistema.
Un progetto collaborativo tra ricerca accademica e industria
Il robot è il risultato di un progetto di ricerca condotto in collaborazione con il gruppo chimico BASF, nell’ambito della California Research Alliance, un’iniziativa che promuove l’innovazione tecnologica attraverso il dialogo tra università e aziende. La National Science Foundation statunitense ha contribuito al finanziamento dell’attività.
Il responsabile scientifico del progetto, il professor Michael Tolley, docente di ingegneria meccanica e aerospaziale all’Università della California di San Diego, ha evidenziato come questa ricerca rappresenti un modo alternativo di concepire le macchine mobili:
“Non ci siamo affidati ai componenti rigidi e standard che normalmente si utilizzano in robotica. Abbiamo invece esplorato un sistema interamente meccanico e flessibile, che possa funzionare in modo affidabile senza il supporto di elettronica.”