Di cosa si parla e perché interessa chi lavora con stampa 3D e robotica
Progettare un umanoide “compatto” richiede di far combaciare tre mondi che spesso restano separati: la meccanica (geometrie, pesi, resistenza dei componenti), la dinamica (coppie richieste agli attuatori e comportamento in movimento) e la stabilità del passo (evitare cadute e ribaltamenti). Quando il corpo del robot è realizzato in polimeri stampati in 3D, la coerenza tra progetto e verifica diventa ancora più importante, perché rigidità e resistenza dipendono da materiale, orientamento di stampa e scelte costruttive.
La fonte tecnica: il paper IJFMR e l’approccio “unificato”
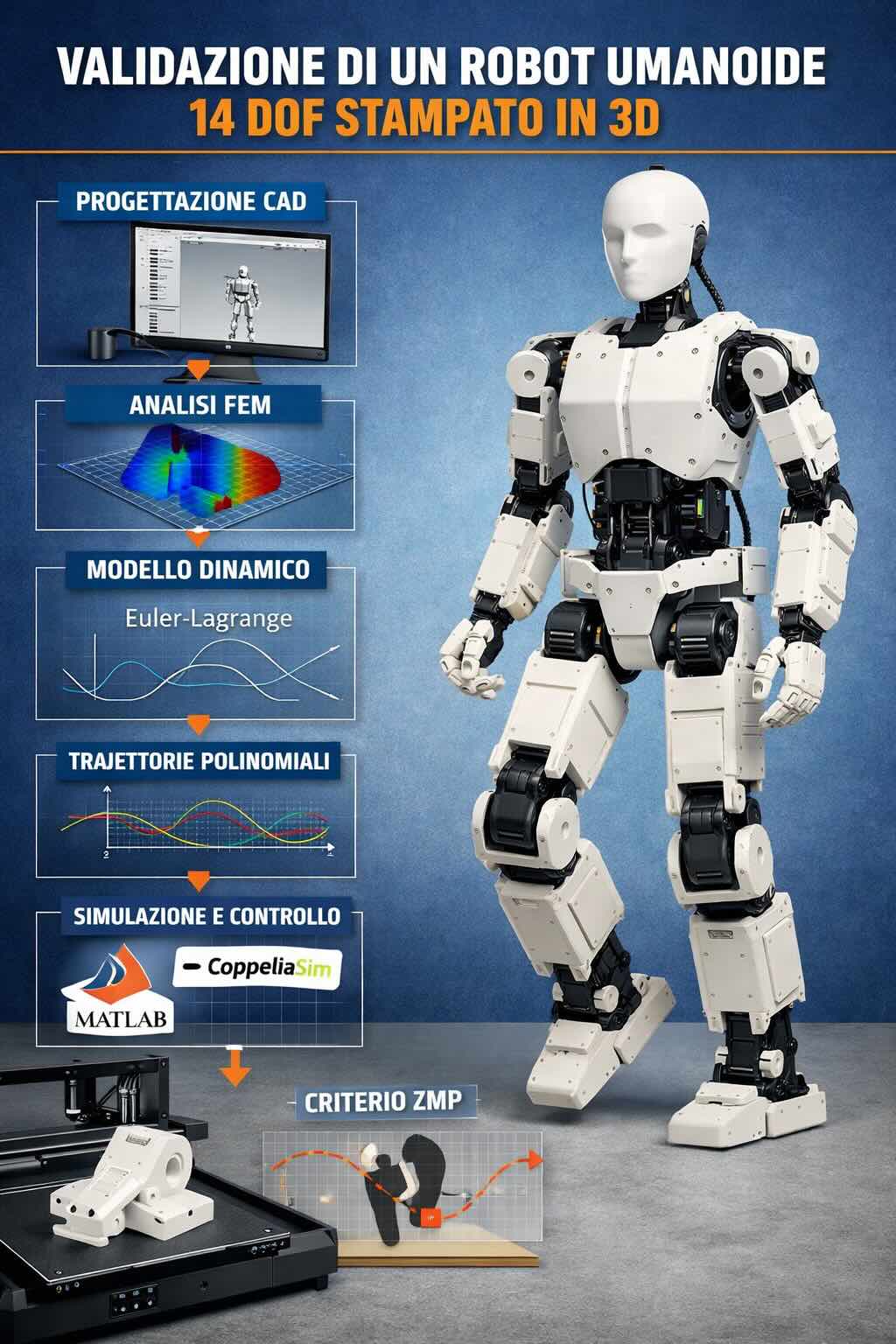
Il lavoro di Marthala Narayana Reddy e M. Indira Rani (Marpu) della Jawaharlal Nehru Technological University (JNTU), Hyderabad (India) propone un “workflow” continuo che parte dal CAD e arriva a una validazione numerica completa: progettazione meccanica → verifica strutturale FEM → modellazione cinematica e dinamica → generazione traiettorie → simulazione e controllo → verifica stabilità del cammino. La pubblicazione è datata 05/02/2026 e riporta anche un DOI ufficiale.
Componenti in PLA e verifica strutturale: cosa viene controllato
Nel paper, le parti strutturali stampate in 3D sono indicate come PLA e vengono sottoposte a una verifica FEM con un carico “conservativo” dichiarato pari a 1 kN. L’idea non è “dimostrare che regge tutto in ogni scenario”, ma eliminare il rischio più comune: scoprire troppo tardi che una staffa, un supporto o un elemento di collegamento flette o si rompe quando il robot entra in moto. In pratica, si usa la FEM per filtrare le geometrie critiche prima di investire tempo su attuazione e controllo.
Perché PLA: vantaggi e limiti da tenere in mente
Il PLA è spesso scelto per prototipi e telai leggeri perché è facile da stampare e consente geometrie complesse; però non è “un materiale unico”: le proprietà possono variare con composizione, parametri e orientamento. Per dare un riferimento pratico, valori tipici di modulo elastico e resistenza a trazione riportati da laboratori e service possono collocarsi nell’ordine dei GPa per la rigidezza e delle decine di MPa per la trazione, con differenze legate anche all’asse Z. Per un umanoide, questo si traduce in una regola operativa: progettare pensando a rinforzi locali, nervature, spessori coerenti e riduzione di concentrazioni di tensione, invece di “spingere” tutto sugli attuatori.
Cinematica: parametri coerenti dal CAD e convenzione Denavit–Hartenberg
Per passare da un modello “bello” in CAD a un modello “utile” per il controllo servono parametri geometrici e inerziali coerenti: masse, baricentri, lunghezze, offset e limiti di giunto. Nel workflow proposto, il CAD diventa la base per estrarre questi dati e impostare la cinematica diretta con la convenzione Denavit–Hartenberg, un passaggio standard per descrivere catene cinematiche in modo riproducibile. Il risultato atteso non è solo ottenere la posa dell’end-effector o degli arti, ma avere un modello pronto per essere collegato alla dinamica e alla simulazione.
Dinamica e coppie: modello Euler–Lagrange per capire “quanto motore serve”
Una delle domande più pratiche nella costruzione di un umanoide è: gli attuatori scelti ce la fanno davvero? Nel paper, le coppie di giunto vengono derivate tramite modellazione dinamica Euler–Lagrange, con l’obiettivo di stimare profili di coppia durante traiettorie controllate. Questa parte del workflow serve a evitare due errori tipici: sottodimensionare (robot che non si alza o si siede “a scatti”) oppure sovradimensionare (peso e costi che crescono, con effetti negativi sulla stabilità).
Traiettorie “lisce”: interpolazione polinomiale cubica e profili verificabili
Per far muovere 14 gradi di libertà in modo coordinato, serve che posizione, velocità e accelerazione non introducano discontinuità inutili. Nel workflow viene citata la generazione di traiettorie con interpolazione polinomiale cubica, una scelta diffusa perché permette di costruire profili regolari e controllabili, utili sia per simulare sia per non “stressare” meccanica e motori con cambi improvvisi. In un progetto reale, questa parte si collega anche alla calibrazione: tempi di passo, ampiezza dei movimenti, limiti di giunto, e margini rispetto alle coppie massime.
Stabilità del passo: criterio ZMP e perché è ancora usato
Per la locomozione bipede, il paper indica l’uso del criterio ZMP (Zero Moment Point) per valutare la stabilità del cammino. In termini semplici: lo ZMP è un punto sul piano di contatto (di solito il suolo) che aiuta a capire se la risultante delle forze e dei momenti durante il movimento rimane compatibile con una postura “non ribaltante”. È un criterio molto usato perché collega dinamica e contatto piede-suolo in modo operativo: se lo ZMP esce dall’area di supporto, aumentano i rischi di perdita di equilibrio.
Simulazione: MATLAB + CoppeliaSim per validare profili e controllo
La validazione del workflow passa da simulazioni che riportano tracciamenti di posizione, velocità e coppia sui 14 DOF, indicando coerenza tra traiettorie richieste e fattibilità attuativa. Gli strumenti citati sono MATLAB e CoppeliaSim: quest’ultimo è un simulatore robotico pensato per prototipazione di algoritmi, verifica di cinematica/dinamica e test con diverse opzioni fisiche. In un flusso moderno, questo tipo di simulazione è anche una “rete di sicurezza”: consente di individuare instabilità, oscillazioni o richieste di coppia anomale prima di rompere componenti stampati o stressare servo e riduttori.
Checklist pratica per replicare un workflow simile in laboratorio
Se vuoi trasformare questo approccio in un metodo ripetibile (anche per progetti piccoli), puoi usare una checklist “da officina + simulazione”:
- CAD e distinta: assegna materiali, densità, masse, posizioni dei baricentri; crea versioni controllate dei file.
- FEA mirata: testa i componenti critici (supporti, giunti, staffe), usando carichi realistici e casi conservativi.
- Modello cinematico: definisci DH o un modello equivalente; valida con pose note.
- Dinamica e coppie: stima le coppie per traiettorie “tipo” (alzata gamba, flessione ginocchio, passo).
- Traiettorie: usa profili lisci (polinomi) e imposta limiti di velocità/accelerazione.
- Stabilità: verifica ZMP o criteri equivalenti rispetto al poligono di supporto.
- Simulazione: confronta profili e controlla saturazioni (coppia massima, velocità massima, limiti di giunto).
- Iterazione: se la coppia è troppo alta, non “aggiungere solo motore”: valuta prima geometrie, masse, leve e rigidità.