Un gruppo di studenti cinesi stanno sviluppando il 6-Axis Robotic 3D a braccio robotico ispirato dalle ragnatele.
Un team di progettisti di Shanghai consapevoli della forza delle ragnatele, sono riusciti a prendere un fenomeno naturale piuttosto inquietante e usarlo come fonte di ispirazione nel loro laboratorio. Al “Digital Future” Shanghai Summer Workshop presso il Collegio di Architettura e Urbanistica della Tongji University, un team ha presentato una stampante 3D robotica spaziale. Sotto la direzione del maestro Yu Lei da Tsinghua, con workshop leader Philip F. Yuan dalla Tongji, e come software tutorial Panagiotis Michalatos greco dal GSD, il team di progettazione – composto da Ji Shi il leader, Liu Xun, Luo Ruihua, e Cui Yuqi – ha sviluppato la stampante 6-Axis Robotic 3D , che cerca di “eliminare il confine tra ‘Progettazione ‘ e ‘Fabbricazione’
Il membro del team Ji Shi, spiega che “Le tecnologie di fabbricazione digitale, come l’applicazione dei robot industriali, hanno dimostrato eccellenti prestazioni in sostituzione del lavoro umano. Tuttavia, il potenziale di progettazione non è stato completamente esplorato e apparentemente siamo più coinvolti nella fabbricazione digitale che nel processo di fabbricazione, e il divario tra la progettazione e la produzione esiste. In questo progetto quello a cui stiamo puntando è capire il modo di integrare la fabbricazione digitale nella progettazione e nella produzione. E’ un po’ come la rinascita dell’artigianato nell’era digitale. Le Fabbriche non richiedono solo tecnologia ; ma anche strategie intelligenti per sostituire il lavoro umano. ”
La Strategia inizia dal lato umano del processo, e il lato umano ha bisogno di una fonte di ispirazione. E qui entrano in gioco i ragni.
La prima fase del progetto è stata la “Biomimetic Concept & Simulation”, usando come ispirazione la ragnatela nel tentativo di copiare Il filo del ragno . La forza di una ragnatela non viene solo dalla facilità di tessitura, ma anche dal filo stesso, che il ragno gira in una forma distinta – questa forma potrebbe beneficiare di una struttura autoportante che possiamo stampare in 3d.
“La tecnologia di stampa 3D ha grandi potenzialità nel futuro campo di fabbricazione,” si nota, “però … Questo processo di produzione ha limitazioni nella flessibilità spaziale e non riesce a eseguire una strategia strutturale di fabbricazione. Questo perché l’attuale tecnologia di stampa 3D si basa principalmente sulla sovrapposizione lungo la direzione della gravità “.
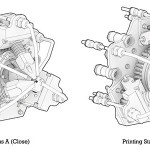
La seconda fase, “Design of the Printing Head (Robotic End-Effector).” Piuttosto che puntare alla estrusione tradizionale layer-by-layer, la 6-Axis Robotic 3D imita la micro-struttura della ragnatela per creare oggetti autoportanti. La stampa del dispositivo robotico è caratterizzata da tre testine di stampa che si muovono, con una testina di stampa fissa centrale. Il sistema grazie ad un servo motore ruota la piastra, ciò porta le testine di stampa mobili ad oscillare, formando dei nodi a mandrino .
La fase tre, “Design of External Digital Control System Progettazione del sistema di controllo digitale esterno,” consente il controllo della robot . Il sistema è basato su Arduino e comprende quattro servo motori che funzionano “come normali dispositivi di stampa 3D” per guidare il sistema di erogazione ABS, mentre un motore rotante e montato sul piatto . L’aria compressa viene inviata tramite tubi alle testine di stampa per raffreddare e impostare l’ABS una volta estruso, inoltre ciascuna testina di stampa ha il suo riscaldatore programmabile per mantenere le temperature di estrusione adeguate. Tutti i motori e i dispositivi sono controllati da interruttori nel pannello di controllo del sistema di controllo digitale.
L’intero progetto è incredibilmente impressionante – soprattutto se si considera che è stato fatto in sole tre settimane durante l’estate. Ma Ji Shi fa notare che è ancora un work-in-progress.