Bluebot: gli scienziati di Harvard stampano sciami di pesci robotici
I ricercatori dell’Università di Harvard hanno stampato in 3D una scuola di pesci robotici che sono in grado di nuotare secondo schemi complessi senza l’ausilio di Wi-Fi o GPS.
Ispirati dai pesci chirurgo che vivono nelle barriere coralline, questi “bluebots” hanno quattro pinne per una navigazione precisa e un sistema di LED e telecamere che consentono loro di nuotare nei banchi senza scontrarsi. L’autonomia dei minuscoli bot potrebbe renderli ideali per applicazioni di monitoraggio ecologico.
Nel mondo animale puoi trovare collettivi auto-organizzati che lavorano insieme e si muovono insieme. Che si tratti di colonie di formiche, stormi di uccelli o banchi di pesci. Recentemente, un certo numero di ricercatori ha tentato di imitare questa intelligenza naturale dello sciame. Tuttavia, questi robot sciame sono per lo più telecomandati o guidati da GPS e non auto-organizzati.
Finora la comunicazione radio o GPS convenzionale si è dimostrata inefficace sott’acqua, quindi è diventato necessario lo sviluppo di un approccio di sincronizzazione. Ispirati da veri banchi di pesci che possono essere guidati solo da segnali visivi impliciti, gli scienziati di Harvard hanno quindi deciso di sviluppare un nuovo sistema di navigazione che non richiede alcun controllo esterno.
Lo sciame robotico nuota come un banco di pesci
L’invenzione dei bluebots
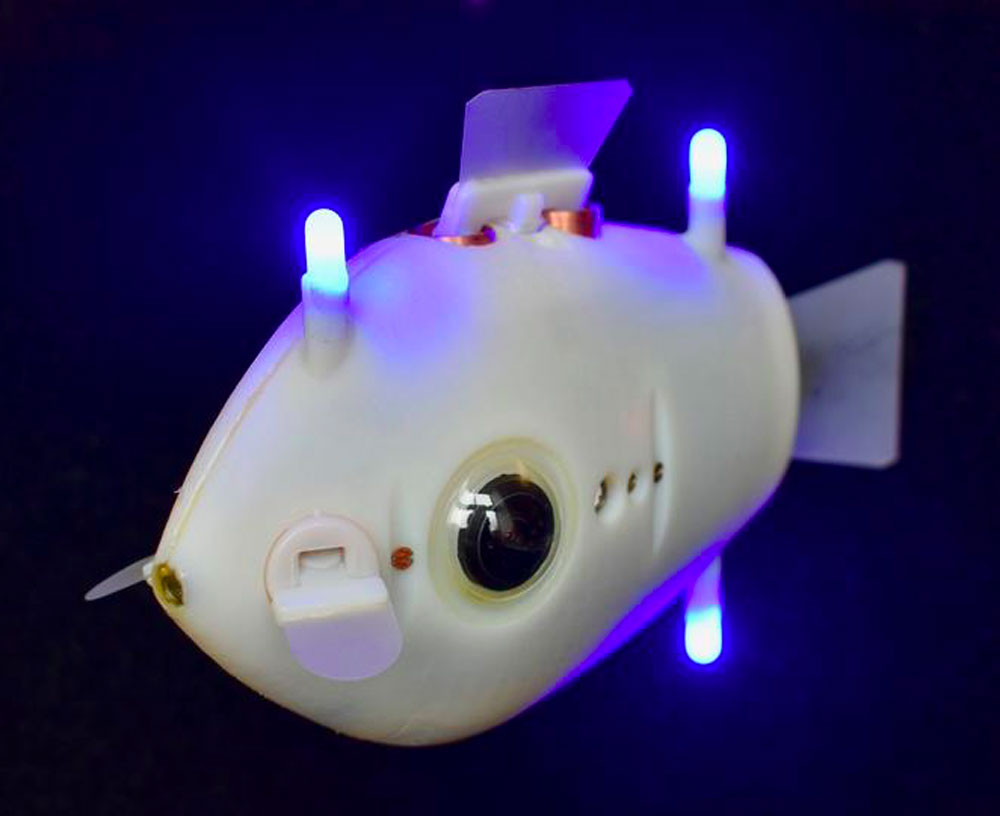
Il team di Harvard ha sviluppato sette robot morbidi in miniatura, autonomi e ispirati ai pesci, che hanno chiamato “bluebots”. I minuscoli robot hanno una serie di sensori e attuatori che consentono loro di percepire tutte e tre le dimensioni dello spazio e di spostarsi intorno ad esse.
Per dotare i Bluebots di una vista 3D, gli scienziati li hanno anche dotati di due obiettivi grandangolari da 195 ° e di un paio di LED a luce blu sovrapposti verticalmente. In sostanza, le telecamere agiscono come gli “occhi” dei robot. Con l’aiuto di algoritmi basati sulla visione, sono in grado di identificare rapidamente la posizione dei loro vicini e cambiare rotta.
Durante i test, i Bluebots sono stati programmati per lampeggiare periodicamente a un certo intervallo di tempo. Ciò ha permesso loro di riunirsi in uno sciame, in un movimento che, dall’esterno, sembrava essere spontaneo. Negli esperimenti successivi, i robot sono stati quindi impostati a intervalli diversi in modo che potessero passare ripetutamente da stati sparsi a stati aggregati.
Come test finale, gli scienziati hanno utilizzato algoritmi di coordinazione impliciti per creare una formazione che assomigliava alla “macinatura”, un movimento simile a un vortice usato dai pesci reali per evitare i predatori. Alla fine i bluebot sono stati in grado di ottenere una versione ridotta al minimo del fenomeno e hanno nuotato in senso orario o antiorario in cerchi dinamici.
Gli scienziati ritengono che i progressi nella tecnologia delle telecamere e della propulsione consentiranno lo sviluppo di nuovi robot sottomarini più complessi. Per ora, tuttavia, la tecnologia di coordinamento del team potrebbe essere utilizzata per controllare i veicoli senza pilota in aree come le missioni collettive di ricerca e soccorso.
I risultati dei ricercatori sono descritti in dettaglio nel loro documento intitolato ” Coordinamento implicito per comportamenti collettivi subacquei 3D in uno sciame di robot ispirato ai pesci “. La ricerca è stata scritta in collaborazione con Florian Berlinger, Melvin Gauci e Radhika Nagpal.