Il guanto subacqueo mette le abilità del polpo nelle mani degli umani
Chanhong Lee e Ravi Tutika testano l’Octa-Glove nel laboratorio di Michael Bartlett. Foto di Alex Parrish per Virginia Tech.
Un team di ricercatori guidati dal Virginia Tech Assistant Professor Michael Bartlett ha sviluppato un guanto ispirato al polpo in grado di afferrare saldamente gli oggetti sott’acqua. La loro ricerca è stata selezionata per la copertina del 13 luglio di Science Advances .
Gli esseri umani non sono naturalmente attrezzati per prosperare in un ambiente sottomarino. Usiamo serbatoi per respirare, tute in neoprene per proteggere e riscaldare il nostro corpo e occhiali per vedere chiaramente. In un tale ambiente, anche la mano umana è scarsamente attrezzata per aggrapparsi alle cose. Chiunque abbia provato ad aggrapparsi a un pesce che si dimena testimonierà che gli oggetti sottomarini sono difficili da afferrare con le nostre dita terrestri.
“Ci sono momenti critici in cui questo diventa una responsabilità”, ha affermato Bartlett. “La natura ha già delle ottime soluzioni, quindi il nostro team ha cercato idee nel mondo naturale. Il polpo è diventato una scelta ovvia per l’ispirazione”.
Soccorritori, archeologi subacquei, ingegneri di ponti e squadre di salvataggio usano tutti le mani per estrarre persone e oggetti dall’acqua. Le mani umane con meno capacità di trattenere oggetti scivolosi devono ricorrere all’uso di più forza e una presa di ferro a volte può compromettere queste operazioni. Quando è richiesto un tocco delicato, sarebbe utile avere le mani fatte per l’acqua.
Queste sono le stesse appendici che Bartlett e i suoi colleghi ricercatori hanno cercato di costruire. Il suo team del Soft Materials and Structures Lab ha adattato soluzioni biologiche a nuove tecnologie realizzate con materiali morbidi e robotica.
Prendendo ispirazione dalla potente adesione
Il polpo è una delle creature più singolari del pianeta , dotata di otto lunghe braccia che possono afferrare una miriade di cose in un ambiente acquatico. In una bella integrazione di strumenti pratici e intelligenza, queste braccia sono ricoperte da ventose controllate dal sistema muscolare e nervoso dell’animale marino.
Ogni ventosa, a forma di estremità di uno stantuffo, contribuisce a una potente capacità di strappare. Dopo che l’ampio bordo esterno della ventosa si è sigillato con un oggetto, i muscoli si contraggono e rilassano l’area della coppa dietro il bordo per aggiungere e rilasciare la pressione. Quando molte delle ventose sono impegnate, si crea un forte legame adesivo che è difficile sfuggire.
“Quando osserviamo il polpo, l’adesivo spicca sicuramente, attivando e rilasciando rapidamente l’adesione su richiesta”, ha affermato Bartlett. “Ciò che è altrettanto interessante, tuttavia, è che il polpo controlla oltre 2.000 ventose su otto braccia elaborando le informazioni provenienti da diversi sensori chimici e meccanici. Il polpo sta davvero combinando sintonizzabilità dell’adesione, rilevamento e controllo per manipolare oggetti sottomarini.
Mettere in atto l’ispirazione
Per progettare il loro guanto, i ricercatori si sono concentrati sulla re-immaginazione delle ventose: steli di conformi, ricoperti da membrane morbide e azionate. Il design è stato creato per svolgere la stessa funzione della ventosa di un polpo, attivando un fissaggio affidabile agli oggetti con una leggera pressione, ideale per aderire a superfici sia piane che curve.
Avendo sviluppato i meccanismi adesivi, avevano anche bisogno di un modo per il guanto di rilevare gli oggetti e innescare l’adesione. Per questo, hanno coinvolto il professor Eric Markvicka dell’Università del Nebraska-Lincoln, che ha aggiunto una serie di sensori di prossimità ottici micro-LIDAR che rilevano quanto è vicino un oggetto. Le ventose e il LIDAR sono stati quindi collegati tramite un microcontrollore per accoppiare il rilevamento dell’oggetto con l’impegno della ventosa, imitando così i sistemi nervoso e muscolare di un polpo.
L’utilizzo dei sensori per innestare le ventose rende anche il sistema adattabile. In un ambiente naturale, un polpo avvolge le braccia attorno a dirupi nelle rocce e nelle superfici, attaccandosi a conchiglie lisce e cirripedi ruvidi. Il team di ricerca voleva anche qualcosa che fosse naturale per gli esseri umani e permettesse loro di raccogliere le cose senza sforzo, adattandosi a forme e dimensioni diverse come farebbe un polpo. La loro soluzione era un guanto con ventose sintetiche e sensori strettamente integrati tra loro, un’armonia di sistemi indossabili che afferrano molte forme diverse sott’acqua. Lo chiamavano Octa-guanto.
“Fondendo materiali adesivi morbidi e reattivi con l’elettronica incorporata, possiamo afferrare oggetti senza doverli schiacciare”, ha affermato Bartlett. “Rende la naturale di oggetti bagnati o sott’acqua molto semplice e più naturale. L’elettronica può attivare e rilasciare rapidamente l’adesione. Basta muovere la mano verso un oggetto e il guanto fa il lavoro per afferrarlo. Tutto può essere fatto senza che l’utente prema un solo pulsante”.
Mettere il guanto
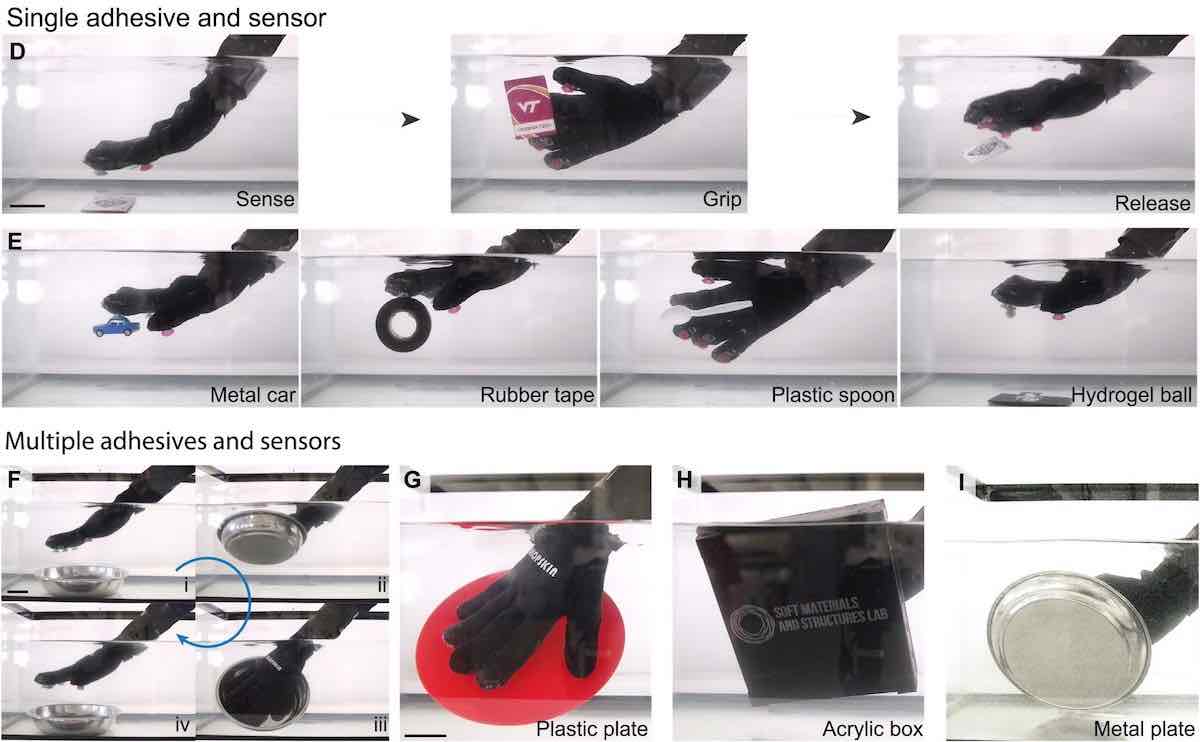
Durante i test, i ricercatori hanno provato diverse modalità di presa. Per manipolare oggetti delicati e leggeri, hanno utilizzato un unico sensore. Hanno scoperto che potevano raccogliere e rilasciare rapidamente oggetti piatti, giocattoli di metallo, cilindri, la porzione a doppia curva di un cucchiaio e una sfera di idrogel ultramorbida. Riconfigurando la rete di sensori per utilizzare tutti i sensori per il rilevamento di oggetti, sono stati anche in grado di afferrare oggetti più grandi come un piatto, una scatola e una ciotola. Gli oggetti piatti, cilindrici, convessi e sferici costituiti da materiali sia duri che morbidi sono stati attaccati e sollevati, anche quando gli utenti non hanno afferrato l’oggetto chiudendo le mani.
“Queste capacità imitano la manipolazione avanzata, il rilevamento e il controllo dei cefalopodi e forniscono una piattaforma per pelli adesive subacquee sintetiche in grado di manipolare in modo affidabile diversi oggetti sottomarini”, ha affermato il ricercatore post-dottorato Ravi Tutika. “Questo è sicuramente un passo nella giusta direzione, ma c’è molto da imparare sia sul polpo che su come realizzare adesivi integrati prima di raggiungere la piena capacità di presa della natura”.
Guardando al futuro, i ricercatori immaginano che il guanto svolga un ruolo nel campo della robotica morbida per la presa subacquea, nelle applicazioni nelle tecnologie assistite dall’utente e nell’assistenza sanitaria e nella produzione per l’assemblaggio e la manipolazione di oggetti bagnati.
Questo lavoro è stato eseguito con Sean Frey, ABM Tahidul Haque, Elizabeth Krotz, Cole Haverkamp e Chanhong Lee, in rappresentanza della Virginia Tech, della Iowa State University e dell’Università del Nebraska-Lincoln. La ricerca è stata supportata dalla National Science Foundation attraverso il programma Designing Materials to Revolutionize and Engineer our Future.
Di Alex Parrish da Virginia Tech vtx.vt.edu