ETH Zurich costruisce il robot YuMi IRB 14000 stampato in 3D per il taglio a filo caldo con aste flessibili
Il taglio del polistirolo con fili caldi richiede tempo e è noioso. Per semplificare il processo, i ricercatori dell’ETH di Zurigo hanno prodotto un robot chiamato YuMi IRB 14000, che consente anche di tagliare forme complesse con aste flessibili. Anche la stampa 3D ha avuto un ruolo nello sviluppo del prodotto. Tutte le informazioni sul progetto.
Laboratorio di robotica computazionale ETH ZurigoI ricercatori del Computational Robotics Lab dell’Institute of Computer Science dell’ETH di Zurigo hanno costruito un robot a due bracci utilizzando la produzione additiva. Con il bot stampato in 3D, sono possibili modelli complessi in schiuma di polistirolo senza contatto fisico con il materiale. Nel 2018, i ricercatori dell’ETH di Zurigo e del MIT hanno raggiunto la massima rigidità dei corpi in materiali leggeri con stampa 3D di disegni complessi
Taglio a filo caldo in polistirolo
Il taglio del polistirolo (noto anche come polistirolo) con fili caldi richiede molto tempo e richiede un perfezionamento con altri strumenti. Di solito, vengono utilizzati fili dritti e caldi per questo, che forniscono un taglio netto, ma non consentono geometrie complesse. Nel 2016, i ricercatori danesi hanno tentato per la prima volta il taglio a filo caldo di superfici curve in un unico passaggio. I ricercatori svizzeri hanno spiegato che il coltello da taglio doveva rimanere planare e che il sistema richiedeva l’input dell’utente per problemi non banali.
Dettagli sul robot stampato in 3D YuMi IRB 14000
Il robot YuMi IRB 14000 a due bracci , anch’esso fabbricato con una stampante 3D , ha lo scopo di consentire un processo più efficiente. Ad ogni estremità del collegamento c’è un’asta di metallo elastico non estensibile che muove le sue “mani” di sette gradi. Ciò gli conferisce un’eccellente destrezza e consente progetti 3D precisi.
Una volta determinata la forma del bersaglio, il software del robot genera una serie di traiettorie per creare il taglio. Le traiettorie consentono un efficiente movimento della mano e riducono la differenza tra il pezzo corrente e la forma del bersaglio. I movimenti vengono eseguiti in modo completamente automatico o controllati dall’utente mediante uno strumento di pianificazione del percorso sequenziale.
Dettagli su esempi di simulazione e prototipi
Associato a YuMi 14000
Il robot a due bracci stampato in 3D YuMi IRB 14000 dovrebbe consentire un processo più efficiente (foto © ABB Robotics).
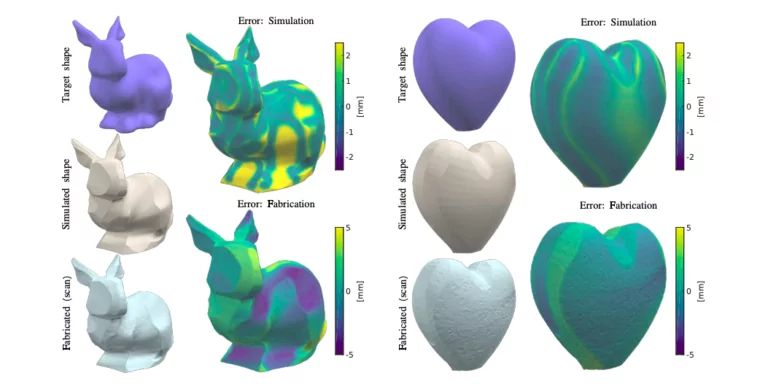
Sono stati fatti alcuni esempi di simulazione e prototipi per valutare il metodo. Un blocco cubico di polistirene espanso con una lunghezza del bordo di 290 mm è stato montato su un treppiede e ruotato manualmente tra i tagli. Ci sono volute 4 ore per fare una mano, e un modello di coniglio ha impiegato solo 2 ore e 20 minuti. Ci sono stati errori medi nell’intervallo di 1,97 mm e 0,76 mm nel coniglio e nel cuore. Ciò è dovuto alla mancanza di rigidità tra le braccia del robot e dell’attacco del treppiede.
Una maggiore velocità di taglio può essere raggiunta aumentando la temperatura del filo. Ma sarebbe più costoso e porterebbe a una riduzione della qualità del taglio. I ricercatori hanno pubblicato tutti i risultati nel loro lavoro intitolato “RoboCut: taglio a filo caldo con barre flessibili controllate da robot” .