Gli ingegneri dell’Università del Maryland hanno utilizzato la stampa 3D per sviluppare una mano robotica in grado di riprodurre un Nintendo Entertainment System (NES).
Stampato utilizzando la tecnologia Stratasys PolyJet, il robot morbido a tre dita è dotato di circuiti fluidici completamente integrati, il che significa che i suoi movimenti sono alimentati dalla pressione dell’aria anziché dall’elettricità. Mentre i ricercatori avrebbero potuto benissimo optare per una dimostrazione standard per valutare le prestazioni della mano, come un pezzo per pianoforte, hanno deciso la precisione e la natura orientata all’obiettivo dei videogiochi realizzati per un esperimento migliore.
Ryan Sochol, coautore dello studio, ha scritto: “Con un pianoforte, saremmo in grado di impostare il tempo in modo arbitrario e qualsiasi errore come la mancanza di una nota non avrebbe penalità significative. Al contrario, i tempi e la composizione del livello del videogioco sono stati stabiliti da tempo e sono invariabili, con un solo errore in grado di provocare un game over immediato, quindi giocare a un gioco come Super Mario Bros. in tempo reale ha fornito un mezzo per valutare le prestazioni del robot morbido che è stato straordinariamente impegnativo e senza compromessi.
Il robot stampato in 3D da allora ha battuto il primo livello di Super Mario Bros.
Come suggerisce il nome, i robot morbidi sono una classe speciale di robot caratterizzati dalla loro malleabilità e morfologia. Di solito sono fabbricati utilizzando materiali flessibili come gomma o silicone e sono già stati utilizzati per anni in applicazioni mediche e manifatturiere.
Poiché sono in grado di modellarsi ed espandersi attorno a strutture complesse, i robot morbidi possono essere impiantati nel corpo umano con un rischio minimo di danni ai tessuti. Questo li rende una grande area di ricerca per applicazioni come strumenti chirurgici, dispositivi per la somministrazione di farmaci e protesi personalizzate. Inoltre, hanno anche trovato il loro utilizzo in impianti di produzione ad alto volume, dove le aziende utilizzano sempre più pinze robotiche morbide sulla linea di produzione.
“Questi tipi speciali di robot sono alimentati utilizzando fluidi come l’acqua o l’aria”, ha detto Sochol alla CBS . “I robot morbidi possono allungarsi o essere gonfiati o sgonfiati con relativa facilità. Di conseguenza, hanno una capacità di adattamento intrinseca per riformarsi attorno a oggetti complessi e talvolta delicati”.
Gli esperimenti di robotica morbida sono diffusi anche nella sfera della stampa 3D. All’inizio di quest’anno, i ricercatori dell’Università di Harvard hanno stampato in 3D una scuola di morbidi pesci robotici in grado di nuotare in schemi complessi senza l’ausilio di Wi-Fi o GPS. Ispirati al caratteristico pesce chirurgo della barriera corallina, i “Bluebots” del team sono dotati di quattro pinne per una navigazione di precisione e un sistema di LED e telecamere che consentono loro di sciamare senza scontrarsi.
Altrove, gli scienziati dell’Università cinese di Tianjin hanno precedentemente stampato in 3D un robot personalizzabile in grado di ridimensionare e monitorare i tubi negli impianti industriali in tempo reale. Il dispositivo monopezzo presenta una serie di meccanismi di piegatura morbida e pinze modulari, che gli consentono di arrampicarsi in modo flessibile su infrastrutture dalla forma strana.
Quindi cosa rende il design del robot stampato in 3D di Sochol così unico? I ricercatori del Maryland hanno integrato quelli che hanno chiamato “circuiti fluidi”, l’impianto idraulico mediante il quale erano in grado di controllare le dita del robot. Piuttosto che utilizzare transistor a semiconduttore per segnalare l’ accensione e lo spegnimento come fanno i microchip elettronici convenzionali, il robot morbido stampato in 3D ha sfruttato i sensori di pressione in ciascuna delle dita. L’azionamento delle dita era quindi controllato dalla pressione dell’aria che scorreva attraverso la mano.
Sochol aggiunge: “La cosa speciale qui è che abbiamo realizzato un nuovo tipo di circuito fluidico in grado di rilevare i tipi di pressione dell’aria per decidere come si comporterà”.
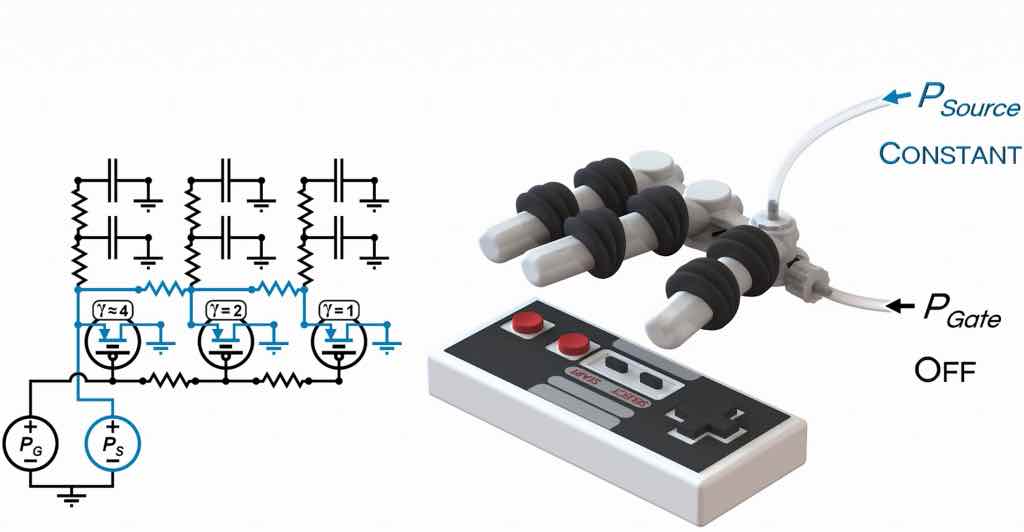
Ad esempio, quando non c’era pressione, non venivano attivate le dita. Quando c’era una pressione bassa, si attivava solo il primo dito. A media pressione, è stato attivato il dito medio e ad alta pressione, è stato attivato l’ultimo dito. Programmando diverse combinazioni di pressioni dell’aria da far scorrere attraverso la mano, il team è stato in grado di attraversare il Mondo 1-1 sul controller NES ed evitare tutti i Goomba per portare Mario sull’asta della bandiera alla fine.
Il circuito fluidico utilizzato per controllare le dita della mano. Immagine tramite l’Università del Maryland.
Nel tentativo di far progredire la robotica morbida e migliorare l’accessibilità, Sochol e il suo team hanno gentilmente reso open-source i file di progettazione per il robot su GitHub . Ulteriori dettagli dello studio possono essere trovati nel documento intitolato “Robot morbidi completamente stampati in 3D con circuiti fluidici integrati” .