La piattaforma robotica di bioprinting mira a curare le ferite gastriche dall’interno del corpo
Abbiamo visto bioprinter portatili utilizzati per attirare nuove cellule sull’osso e stampare la pelle per aiutare a guarire le ferite da ustione , e ora un paio di ricercatori della Tsinghua University cinese hanno sviluppato un robot di bioprinting in grado di trattare le ferite gastriche dall’interno del corpo stesso. Il professor Tao Xu e il dottorando Wenxiang Zhao hanno lavorato insieme per creare un prototipo di robot sufficientemente piccolo da poter essere inserito endoscopicamente nello stomaco di un paziente per il trattamento. Hanno pubblicato un documento sul loro lavoro, intitolato ” Ingegneria preliminare per bioprinting in vivo in situ : una nuova piattaforma di micro-bioprinting per bioprinting in situ in vivo in un sito di ferita gastrica “, nelGiornale di biofabbricazione .
Se non vengono trattate, le ferite aperte sulla parete dello stomaco di una persona possono diventare molto gravi e persino richiedere un intervento chirurgico.
“La lesione della parete gastrica è una delle malattie più comuni nel tratto digerente e circa il 12% della popolazione mondiale ne soffre a vari livelli, secondo una ricerca di Lancet [ 13 ]. Recenti studi hanno dimostrato che la ragione principale della comune lesione della parete gastrica è che l’ H. Pylori all’interno del tratto digerente ha indebolito gli effetti protettivi delle mucose. E i metodi di trattamento tradizionali includono farmaci conservativi e trattamenti chirurgici “, hanno scritto il professor Xu e Zhao nel loro articolo.
“Al momento, sono state condotte poche ricerche sull’applicazione delle tecniche di bioprinting alla riparazione dei tessuti nel tratto gastrico, ma questo è un campo che vale la pena esplorare. Per eseguire il bioprinting in situ in vivo , il primo passo è sviluppare un micro bioprinter disponibile, sulla base del quale possiamo continuare la ricerca successiva sulla creazione di tessuti con bioattività. Questo documento è il primo passo della ricerca su un nuovo approccio che mira a riparare i tessuti tramite bioprinting in situ in vivo “.
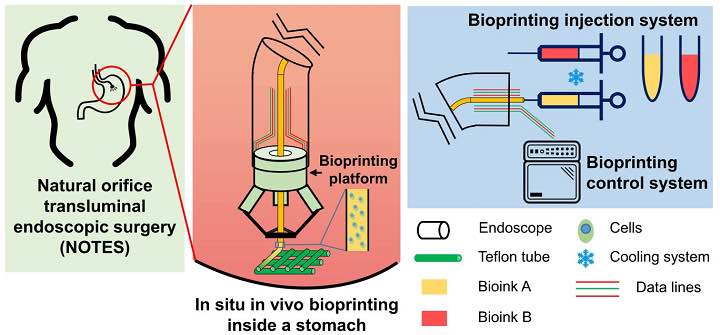
Schema di bioprinting in situ in vivo che prende il caso del trattamento per lesioni della parete gastrica.
Insieme, hanno creato una piattaforma di micro-bioprinting che è abbastanza piccola da essere installata su un endoscopio e poiché può effettivamente piegarsi in una versione più sottile di se stessa mentre viene inserita e quindi aprirsi una volta all’interno, la piattaforma è in grado di raggiungere il sito specifico per completare la stampa 3D in situ per trattare la ferita.
Hanno spiegato nel loro articolo che “la proiezione dello spazio di lavoro della piattaforma dovrebbe essere più grande dell’area della sezione trasversale della piattaforma”, quindi è in grado di avere più spazio di lavoro possibile pur rimanendo nello spazio più piccolo possibile. Ecco perché i ricercatori hanno scelto un robot Delta, il che significa che la sua testa è composta da una piattaforma mobile e una base fissa e rigida, e circondata da tre braccia, o catene cinematiche, che si muovono indipendentemente l’una dall’altra.
“Ogni catena cinematica è composta da un braccio motore e da un braccio passivo, che sono collegati da cerniera sferica. Quest’ultimo consiste in un parallelogramma a circuito chiuso per mantenere la piattaforma mobile in movimento orizzontalmente “, hanno spiegato. “Tuttavia, una cerniera sferica è troppo difficile da elaborare in una micro piattaforma di questo tipo, quindi abbiamo utilizzato le tecniche PC-MEMS per creare due giunti rotanti perpendicolari composti da due strati rigidi e uno strato flessibile con assi di rotazione sfalsati per sostituire la cerniera sferica originale in le catene cinematiche. “
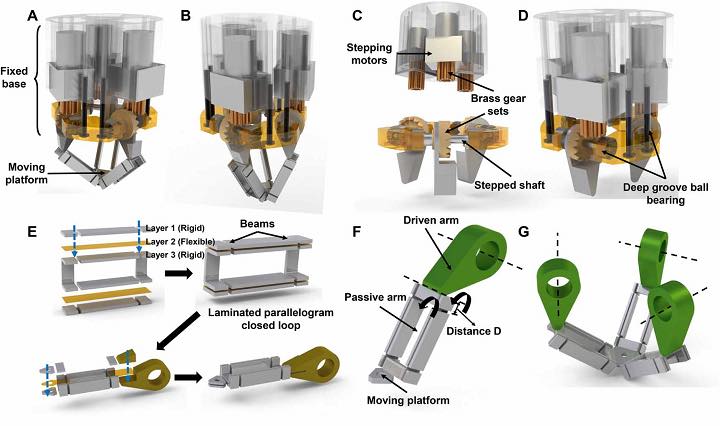
Realizzazione della piattaforma di bioprinting. (A) Robot Delta in stato normale. (B) Robot Delta in stato di piegatura. (C), (D) Fabbricazione della base fissa della piattaforma di bioprinting. (E) Laminazione della catena cinematica utilizzando le tecniche PC-MEMS. (F) Catena cinematica. (G) Piattaforma mobile con catene cinematiche.
Una volta che la piattaforma si è ripiegata per entrare all’interno del corpo, i suoi tre bracci guidano quindi un tubo che estrude due diversi tipi di idrogel bioink in due strati separati per costruire un’impalcatura che copre la ferita gastrica. Un bioink contiene cellule epiteliali gastriche umane e l’altro ha cellule muscolari lisce gastriche umane.
Per testare quanto bene la piattaforma completa il compito di bioprinting, il professor Xu e Zhao hanno stabilito che era necessario “eseguire le traiettorie di base necessarie negli scaffold dei tessuti” e hanno sviluppato un modello di stomaco per i loro esperimenti. Hanno utilizzato il software Materialise Mimics per ricostruire i dati TC di uno stomaco umano e la tecnologia della stereolitografia per stampare il modello in resina trasparente, insieme a un tubo curvo che imitava un endoscopio. La coppia ha fissato la propria piattaforma di bioprinting sul tubo e ha installato un ago calibro 23 al suo interno, collegato a una siringa attraverso un tubo di politetrafluoroetilene (PTFE) per ridurre l’attrito durante il processo di estrusione vero e proprio.
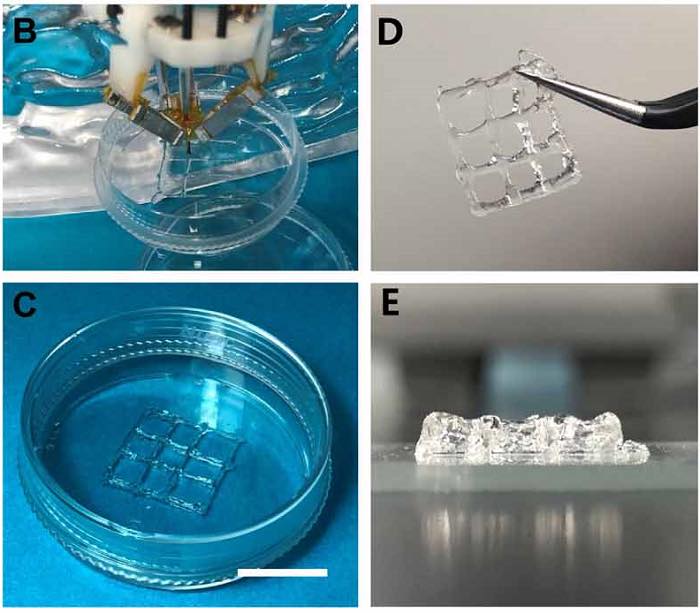
Attrezzatura per esperimenti di bioprinting. (B) Il processo di bioprinting in situ in vivo . (C) Gli scaffold di tessuto a 2 strati stampati costituiti da cellule GES-1 e HGSMC prima della reticolazione. (Barra della scala: 1 cm). (D, E) L’impalcatura stampata a 8 strati con proprietà meccaniche favorevoli.
“Abbiamo testato il sistema in due modi. In primo luogo, con un modello biologico di uno stomaco umano e un endoscopio, per imitare gli elementi operativi di inserimento e stampa del processo. In secondo luogo, abbiamo eseguito un test di bioprinting in un piatto di coltura cellulare per testare l’efficacia del dispositivo nel bioprinting di cellule vitali e nella riparazione delle ferite “, ha spiegato Zhao.
“Una coltura cellulare di 10 giorni ha mostrato che le cellule stampate rimanevano con un’elevata vitalità e una proliferazione costante, il che indicava una buona funzione biologica delle cellule negli scaffold dei tessuti stampati”.
La struttura a due strati era stabile, con fibre lisce, e l’impalcatura a otto strati aveva contorni chiari e alta fedeltà di forma, pur essendo abbastanza piccola da essere presa con una pinzetta. Sebbene il loro esperimento abbia avuto successo, il professor Zu ha affermato che devono ancora perfezionare il sistema, ad esempio rendere la piattaforma di stampa 3D del robot ancora più piccola e migliorare ulteriormente i bioink.
“Anche l’endoscopio corrispondente e altre parti come il sistema di rilevamento saranno progettati e integrati per rendere la bioprinting in situ in vivo una realtà”, hanno concluso.

Primo piano del prototipo di robot all’interno di un modello stampato in 3D di uno stomaco umano.