Ricercatori cinesi progettano robotica e pinze morbide biomimetiche stampate in 3D
Nella materia soffice magnetoattiva programmabile in forma stampata in 3D e pubblicata di recente per applicazioni biomimetiche , i ricercatori cinesi esplorano lo sviluppo di un materiale ad alte prestazioni che si trasforma rapidamente da una forma all’altra come richiesto per applicazioni specifiche.
Gli scienziati dei materiali continuano a essere ispirati dalla natura in molti dei loro studi e conseguenti innovazioni oggi e mentre la stampa 3D si trasforma in stampa 4D con forme che si deformano e poi ritornano alla loro forma originale, la stessa fabbricazione digitale continua ad espandersi. La maggior parte di questi materiali e la conseguente deformazione sono guidati da forze esterne nell’ambiente come temperatura o umidità e possono essere utilizzate come geometrie complesse per applicazioni come medicina, robotica e altro.
In questo studio, gli autori esaminano l’uso del controllo del campo magnetico e dei materiali morbidi magneto-attivi (MASM) poiché offrono il potenziale sia per i sensori che per gli attuatori. Precedenti ricerche sono state condotte con la stampa magnetica 3D, risultando nella fabbricazione di entrambi i compositi anisotropi accoppiati a magneti.
Con una nuova “strategia di programmazione delle forme”, l’obiettivo di questo studio era creare forme stabili che si trasformano rapidamente e sono anche programmabili. Il team di ricerca ha messo in pratica i vantaggi della stampa 3D:
“Con i vantaggi della stampa 3D, questo approccio alla produzione consente agli elementi strutturali magnetici di qualsiasi forma, distribuzione e orientamento di generare profili di magnetizzazione anisotropica. Questo metodo ci consente di programmare il momento magnetico nella matrice morbida, abilitando le capacità di attuazione desiderate dei MASM. Le proprietà di deformazione dei MASM di forma programmabili sono state studiate sinteticamente e il meccanismo fisico correlato è stato proposto. “
“Con queste eccellenti capacità, varie strutture biomimetiche (vermi polmonari, mante e pinze morbide) possono essere facilmente fabbricate con funzioni di camminata, nuoto e presa sotto il campo magnetico uniforme (UMF). Questo approccio proposto può compensare le carenze dei metodi di programmazione esistenti e apre nuove strade per capitalizzare appieno il potenziale dei MASM. “
Il PLA è stato miscelato con un rapporto di volume 6: 1 con particelle di ferro carbonilico (CIP), miscelato meccanicamente per 30 minuti e quindi aggiunto all’estrusore di una stampante 3D FDM.
“Qui, va notato che la stampa di elementi strutturali magnetici è solo uno dei metodi per la progettazione del momento magnetico. La regolazione del momento magnetico può anche dipendere dalla distribuzione delle particelle e dal dominio magnetico “, hanno spiegato i ricercatori.
Alla stampa 3D, tuttavia, le strutture magnetiche erano composte da proprietà ferromagnetiche isotrope dovute alla dispersione uniforme delle particelle di PLA. Il team ha stampato in 3D campioni con una varietà di diversi elementi strutturali magnetici orientati, confermando che queste differenze hanno influito sulle proprietà meccaniche dei MASM.
Alla fine, i ricercatori sono stati in grado di creare una gamma di strutture biomimetiche ispirate alla natura come il verme, la manta e un dispositivo di presa morbido. I campioni fabbricati sono stati anche ispirati da animali come serpenti e molluschi e le forme MASM sono state in grado di imitare le loro strutture e movimenti; tuttavia, la magnetizzazione dipendeva dalla distribuzione e dall’orientamento degli elementi strutturali magnetici adiacenti, il che significa che la magnetica complessiva deve essere considerata per l’efficienza richiesta.
Le strutture campione, “fabbricate con successo”, hanno mostrato potenziale per funzionalità in esercizi come locomozione, nuoto e afferramento. Hanno anche mostrato le proprietà meccaniche desiderate con stabilità e precisione nel cambio di forma, garantendo le prestazioni richieste per la progettazione futura di attuatori e innovazioni robotiche.
Dopo aver considerato la bassa densità, l’eccellente flessibilità e le proprietà adeguate per l’attivazione, il team ha continuato ad andare avanti con il proprio progetto, realizzando robot e attuatori soft:
Il design a pollice viene trasformato in un robot morbido in grado di “camminare” su una piastra dentata creata dai ricercatori.
Il design della manta ha ispirato un altro robot morbido con “muscoli e apertura alare” composto sia da MASM che da SR. Era persino in grado di nuotare sott’acqua.
La pinza morbida ha funzionato oltre a quella di dispositivi simili convenzionali, con presa e rilascio manipolati dall’azionamento magnetico.
“Questo lavoro utilizza semplicemente il campo magnetico uniforme (UMF) solo come attuazione, ma comportamenti di attuazione più complessi possono anche essere generati utilizzando il campo magnetico gradiente. L’approccio proposto apre nuove strade per sfruttare appieno il potenziale dei MASM, consentendo ai ricercatori di sviluppare una vasta gamma di attuatori morbidi che sono fondamentali nelle applicazioni di robotica leggera, cure mediche e bioniche “, hanno concluso gli autori dopo aver completato il loro studio.
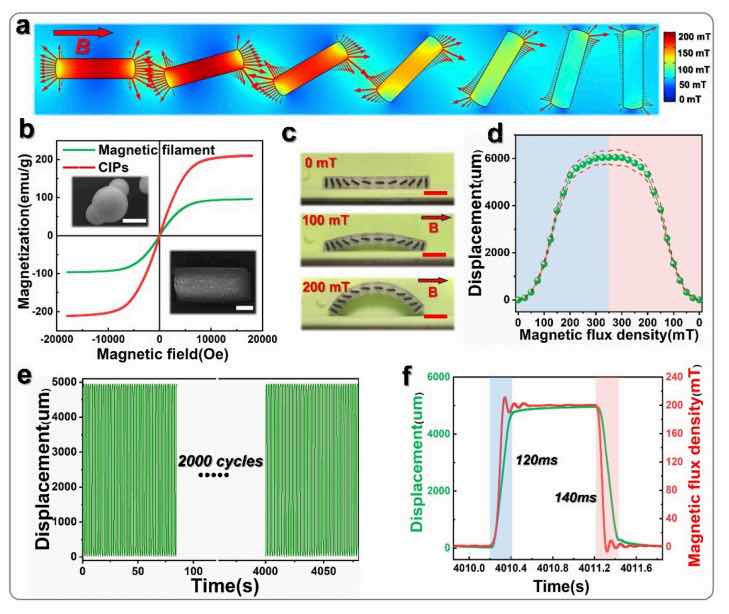
Meccanismi di cambiamento di forma e prestazioni di deformazione della striscia MASM. (a) Analisi agli elementi finiti degli elementi strutturali magnetici orientati valutati da COMSOL. L’intensità dell’UMF applicato è di 300 mT e la direzione è indicata dalla freccia rossa. La densità del flusso magnetico è indicata dalla legenda dei colori e la direzione e l’entità del tensore di sollecitazione superficiale di Maxwell sono indicate dalla direzione e dalle dimensioni logaritmiche delle frecce rosse. (b) Curve di magnetizzazione (momento magnetico per unità di massa) di filamenti magnetici e CIP. Le foto inserite sono immagini SEM di CIP e filamenti magnetici e le barre di scala sono rispettivamente di 2 μm e 0,5 mm. (c) Le fotografie della deformazione di flessione della striscia MASM inferiore a 0, 100 e 200 mT e le barre della scala sono 5 mm. In questo caso, gli elementi strutturali magnetici con una lunghezza di 1,5 mm, larghezza di 0. 3 mm e spessore di 4 mm hanno distribuzioni in SR. (d) Curva della deformazione flettente della striscia MASM in presenza di densità di flusso magnetico crescente e decrescente, che è controllata dalla corrente nell’elettromagnete. La deformazione viene valutata dallo spostamento del punto centrale della striscia MASM. Lo schema di prova è illustrato in Fig. S1e. (e) Prova di ciclo delle prestazioni di deformazione della striscia MASM in campo magnetico transitorio. Il tempo per ciascun ciclo è di 1,5 secondi e include l’aumento e la diminuzione transitori del campo magnetico. Il campo magnetico transitorio viene generato sulla base del movimento del magnete permanente controllato da un motore lineare, come mostrato nella Figura S1f. (f) Curve a ciclo singolo di deformazione di flessione e campo magnetico transitorio. I tempi di risposta e di ripristino sono contrassegnati. 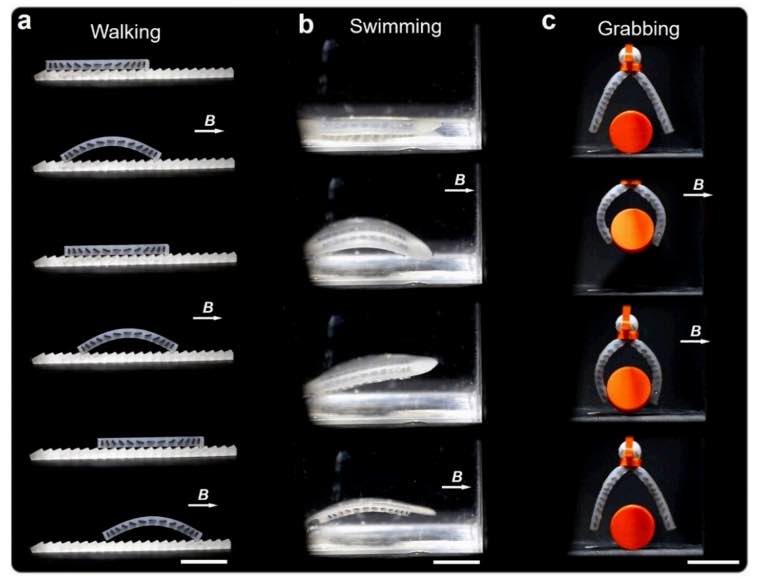
Progettazione di robot soft e attuatori sulla base di MASM a forma programmabile. (a) Movimento a piedi del robot morbido a forma di verme di pollice sulla piastra dentata. La flessione del robot è guidata dall’UMF ed è ripristinata dall’accoppiamento di gravità e forze elastiche. La barra della scala bianca è di 10 mm. (b) Nuoto del robot morbido a forma di manta sott’acqua. L’oscillazione del robot di nuoto è anche guidata dall’UMF. La barra della scala bianca è di 10 mm. (c) Afferrare e rilasciare la pinza morbida. L’azione di presa è guidata dall’UMF e il peso dell’oggetto cilindrico è di 15,3 g. La barra della scala bianca è di 20 mm. In questi casi, l’intensità dell’UMF è di 300 mT e la direzione è indicata dalla freccia. 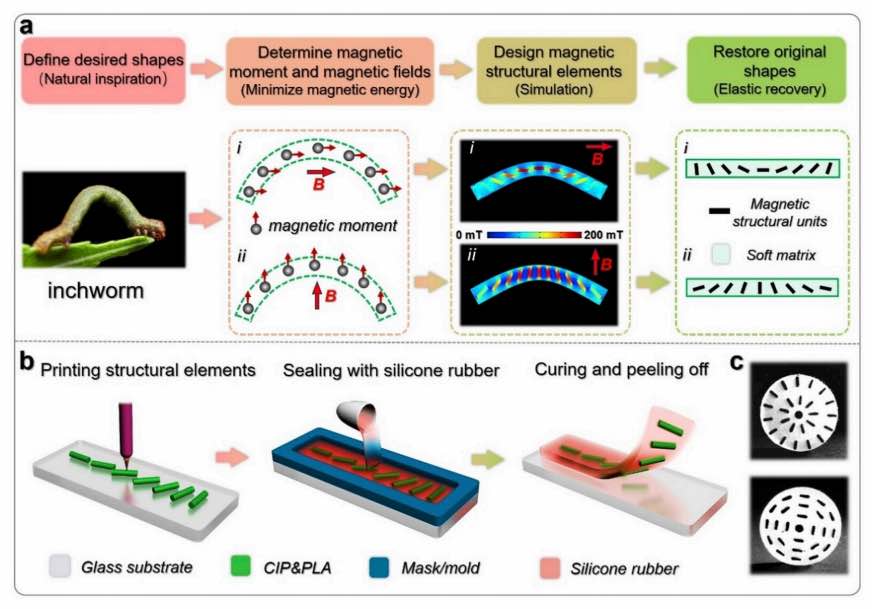
Strategia di programmazione della forma e processo di fabbricazione dei MASM. (a) Il diagramma di flusso della strategia di programmazione della forma e un caso di programmazione per l’imitazione del verme. Le deformazioni sono simulate da COMSOL e la direzione dell’UMF è indicata dalle frecce rosse. (b) Illustrazioni schematiche di stampa 3D e incapsulamento. La stampa 3D viene utilizzata per la produzione dei vari elementi strutturali magnetici, che sono incapsulati in gomma siliconica. (c) Le foto dei campioni MASM con elementi strutturali magnetici orientati. Il raggio dei campioni del disco è di 10 mm. (Per l’interpretazione dei riferimenti al colore in questa legenda delle figure, il lettore si riferisce alla versione Web di questo articolo.) 
Vari MASM di forma programmabili con cambiamento di forma bidimensionale sotto
campi magnetici applicati per imitazione biomimetica. (a) Fotografie di serpenti, stelle marine e stelle fragili. (b) Simulazione ad elementi finiti di forme programmate tramite COMSOL. La densità del flusso magnetico è indicata dal colore. (c) Modifiche bidimensionali di MASM sotto campi magnetici applicati. L’intensità dell’UMF orizzontale è di 200 mT e la direzione è indicata dalla freccia. Per diverse forme programmate, gli elementi strutturali magnetici con una lunghezza di 1,5 mm, una larghezza di 0,3 mm e uno spessore di 4 mm hanno distribuzioni diverse in SR. Tutte le scale sono 10 mm. (Per l’interpretazione dei riferimenti al colore in questa legenda delle figure, il lettore si riferisce alla versione Web di questo
articolo.)