Gli scienziati della Nanyang Technological University (NTU) di Singapore hanno trascorso molto tempo ed energia negli ultimi anni alla ricerca di stampe 3D per l’edilizia con materiali concreti . Due anni fa, il team del NTU Singapore Centre for 3D Printing (SC3DP), guidato dal professor Professor Pham Quang Cuong con la School of Mechanical and Aerospace Engineering di NTU, ha pubblicato un documento sul loro lavoro nello sviluppo di robot mobili contemporanei per la stampa 3D . L’idea era che più robot che lavoravano insieme per costruire una struttura concreta non sarebbero stati frenati da problemi comuni come vincoli di volume e lunghi tempi di consegna.
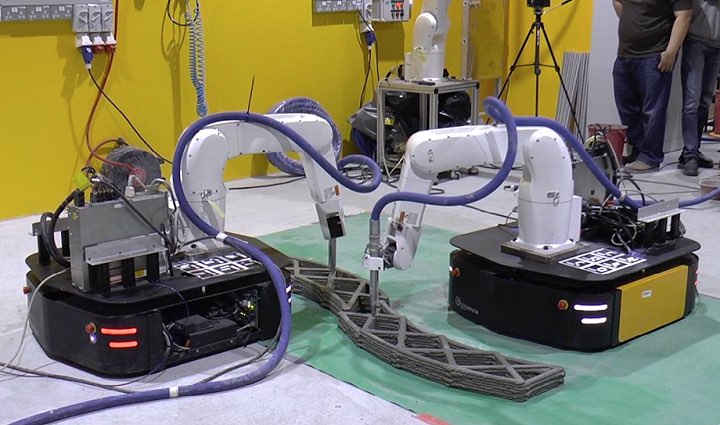
L’adozione della stampa 3D concreta è limitata a causa di problemi come mancanza di mobilità e dimensioni ridotte e l’uso di robot mobili sincronizzati è un luogo eccellente per iniziare a lavorare sul problema della scalabilità. Ma ora, il professor Cuong e il suo team stanno portando le cose al livello successivo. Stanno ancora usando robot mobili per un approccio di stampa in movimento, ma invece di una coppia di sistemi, hanno sviluppato una piattaforma AM industriale a singolo robot in grado di completare la stampa di costruzioni su larga scala da sola.
“Il nostro sistema è montato su un robot mobile. La capacità di spostare la base del robot nello spazio consente al nostro robot di stampare strutture più grandi di se stesso “, ha spiegato il professor Cuong. “Inoltre, avere una base mobile rende più semplice portare il robot in cantiere e spostarlo all’interno.”
Il team NTU, composto da Mehmet Efe Tiryaki, Xu Zhang e il professor Cuong, ha pubblicato un documento sul loro nuovo sistema, intitolato ” Stampa in movimento: un nuovo paradigma per la stampa 3D robotizzata su larga scala “.
Il riassunto recita: “L’edilizia e la costruzione sono diventate recentemente un terreno di applicazione entusiasmante per la robotica. In particolare, i rapidi progressi nella formulazione dei materiali e nella tecnologia della robotica hanno reso la stampa robotica 3D del calcestruzzo una tecnica promettente per la costruzione in situ. Tuttavia, la scalabilità rimane un ostacolo importante all’adozione diffusa: i sistemi di stampa (a portale o a braccio) sono spesso molto più grandi della struttura da stampare, quindi ingombranti. Recentemente, è stato proposto un sistema di stampa mobile – un manipolatore montato su una base mobile – per alleviare questo problema: tale sistema, spostando la sua base, può potenzialmente stampare una struttura più grande di se stessa. Tuttavia, il sistema proposto poteva stampare solo stando fermo, imponendo in tal modo un limite alle dimensioni delle strutture che possono essere stampate in un singolo take. Qui, sviluppiamo un sistema che implementa il paradigma della stampa in movimento, che consente di stampare strutture monoblocco di dimensioni arbitrarie con un singolo robot. Questo sviluppo richiede la risoluzione di problemi di pianificazione del movimento, localizzazione e controllo del movimento specifici della stampa 3D mobile. “
Questo sistema richiede solo un robot per stampare strutture monopezzo di dimensioni diverse, il che aiuta anche a garantire migliori proprietà strutturali.
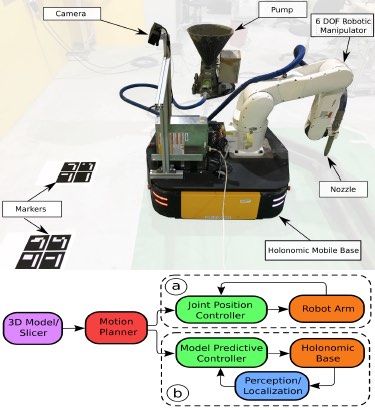
In genere, i materiali da costruzione più larghi della distanza di appoggio del portale di stampa 3D del sistema di costruzione non possono essere stampati. Questo perché le dimensioni di una struttura stampata sono vincolate da una di queste tre cose: la portata del braccio del robot, il volume limitato del cavalletto o la struttura che consente alla testina di stampa di muoversi lungo un determinato asse. Ma i ricercatori NTU hanno permesso al loro sistema di muoversi in qualsiasi direzione, purché su una superficie piana, montando un manipolatore robot industriale su una base con ruote. Quindi, viene utilizzato un tubo per collegare l’ugello della flangia del manipolatore della piattaforma a una pompa.
I movimenti del manipolatore robot e quelli della piattaforma mobile sono accuratamente pianificati in questo nuovo sistema al fine di ottenere uno sforzo coordinato. Utilizza il controllo del movimento di feedback e una localizzazione robotica estremamente accurata, per assicurarsi che l’ugello depositi il materiale in cemento al giusto ritmo nella posizione corretta. Posizionando una videocamera sul retro della base mobile, il suo “sistema di localizzazione” funziona meglio su una superficie più ampia.
Il team di ricerca NTU afferma che il loro sistema di stampa in movimento può aumentare le dimensioni delle strutture che un robot può fabbricare. Per dimostrarlo, hanno utilizzato la piattaforma per stampare in 3D una struttura in calcestruzzo di 210 x 45 x 10 cm monopezzo, che è decisamente più grande della portata di 87 cm del braccio robotico. Questo sistema potrebbe aumentare significativamente l’efficacia della stampa di costruzioni 3D. Tuttavia, il loro lavoro non è ancora terminato, poiché il sistema presenta ancora alcune limitazioni, in particolare in termini di aree di lavoro irregolari.
Il professor Cuong ha spiegato: “Stiamo programmando di aggiungere funzionalità collaborative al nostro robot. L’idea è di fare in modo che un operatore umano prenda a mano il robot e lo sposti nel cantiere, nella posizione desiderata, guidandolo verso un assemblaggio di alta precisione. “