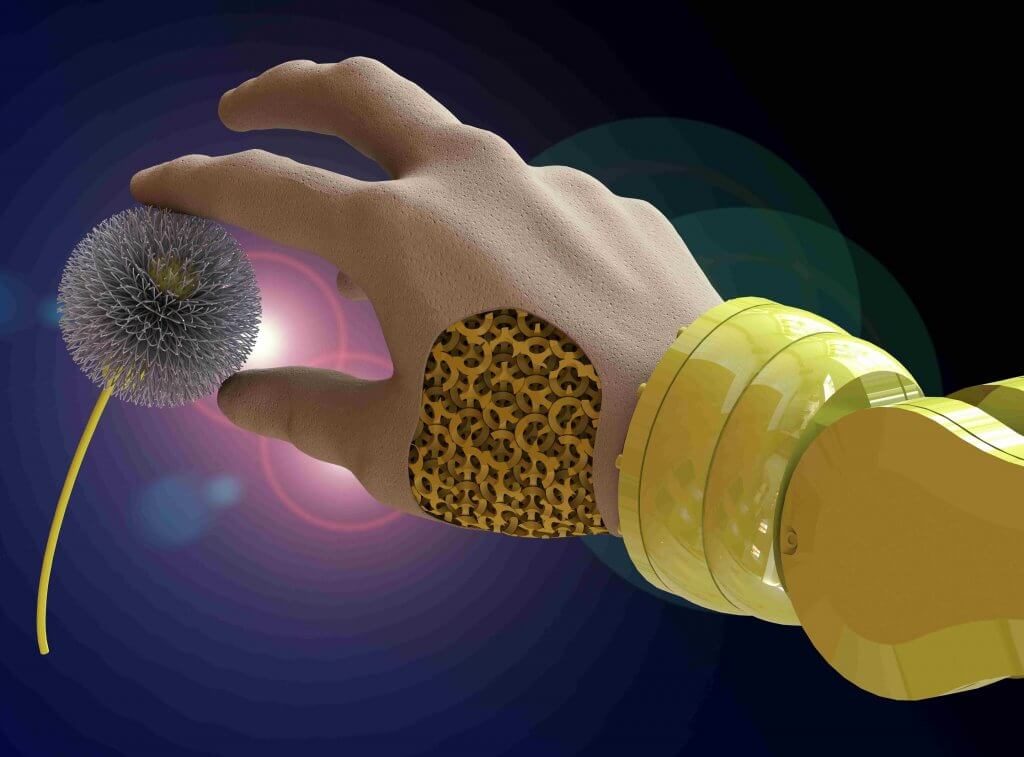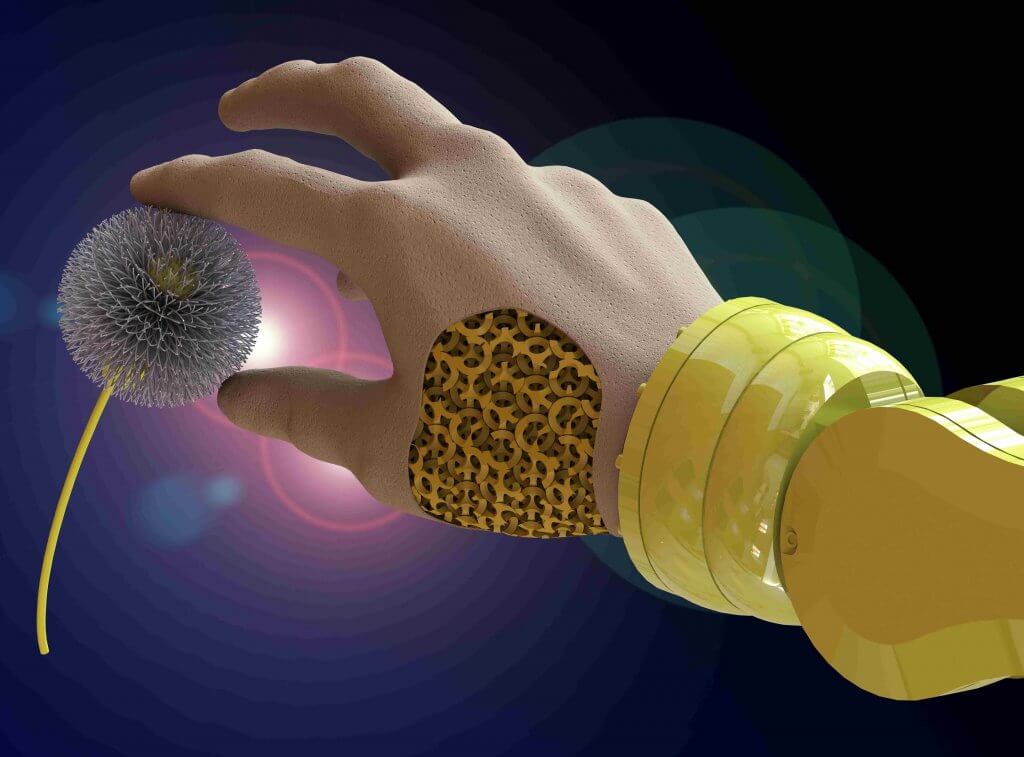
Gli scienziati di Tu Delft continuano ad approfondire la ricerca sulla stampa 3D, sviluppando la robotica avanzata sotto forma di attuatori soft e altamente programmabili. Realizzati con materiali duri e morbidi, gli attuatori sono in grado di eseguire movimenti complessi che i ricercatori ritengono promettenti per i robot che saranno in grado di gestire oggetti “delicati” e di lavorare con gli esseri umani.
Nei meccanismi cellulari ultraconfiabili basati su instabili meccanismi cellulari , gli autori S.Janbaz, FSL Bobbert, MJ Mirzaali e AA Zadpoor spiegano meglio il loro progetto, incentrato su robot estremamente moderni realizzati con metamateriali che non sono solo flessibili ma offrono anche “funzionalità senza precedenti”.
Il primo autore sulla carta, Shahram Janbaz, spiega che i materiali sono imbevuti di tessuto che ha un grande potenziale per la robotica morbida, ma la sintonizzazione finora è stata limitata.
“Ora presentiamo alcuni nuovi progetti di metamateriali meccanici ultra programmabili in cui non solo la forza di attuazione e l’ampiezza, ma anche la modalità di attuazione potrebbero essere selezionati e regolati in un intervallo molto ampio. Dimostriamo anche alcuni esempi di come questi attuatori morbidi potrebbero essere utilizzati in robotica, ad esempio come un interruttore di forza, controllori cinematici e un end-effettore pick-and-place “, afferma Janbaz.
I ricercatori esaminano anche come la deformazione, spesso associata a difetti, sia stata utilizzata per creare una gamma di metamateriali meccanici; tuttavia, questi tipi di materiali fanno molto affidamento sulla programmabilità avanzata. Il team ha creato “approcci di progettazione razionale” con elevata programmabilità e metamateriali morbidi che consentono la forza di attuazione e l’ampiezza di attuazione necessarie.
“La funzione è già incorporata nel materiale”, spiega Zadpoor. “Pertanto, abbiamo dovuto analizzare più a fondo il fenomeno della deformazione. Questo è stato considerato l’epitome del fallimento del design, ma è stato sfruttato negli ultimi anni per sviluppare metamateriali meccanici con funzionalità avanzate. La robotica soft in generale e gli attuatori soft in particolare potrebbero trarre grandi vantaggi da tali materiali di design. Sbloccare il grande potenziale dei materiali guidati dalla deformazione è, tuttavia, subordinato alla risoluzione della limitazione principale dei progetti presentati fino ad oggi, vale a dire la gamma limitata della loro programmabilità. Siamo stati in grado di calcolare e prevedere modalità più elevate di instabilità e rendere il materiale predisposto a queste modalità più elevate. “
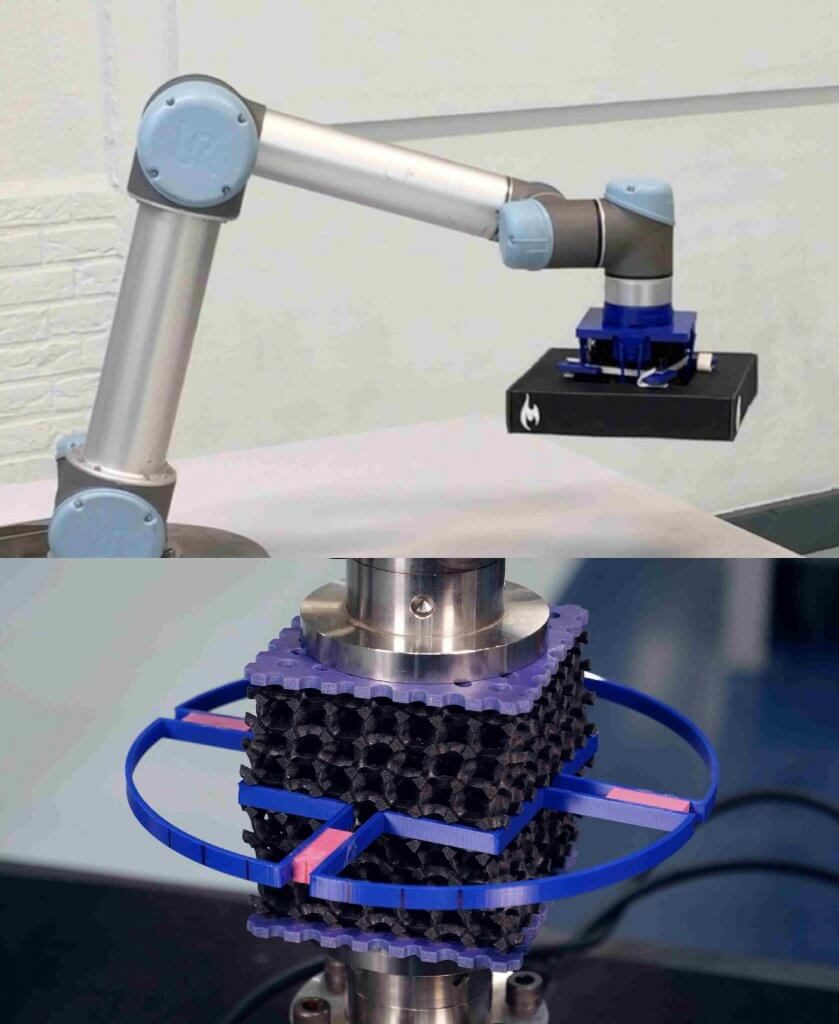
I disegni nello studio coinvolgono anche l’instabilità a doppia faccia, che i ricercatori chiamano la nuova “modalità di instabilità più bassa”. Includono anche un approccio per “pre-disporre” dei metamateriali meccanici morbidi per attivare modalità di instabilità più elevate e senza fare affidamento su altri limiti. Il team ha lavorato insieme per creare un meccanismo cellulare con un modello di instabilità rotazionale, dimostrando funzionalità come interruttore di forza, controller cinematici e un end-effector pick-and-place.
“Quindi presentiamo metamateriali multi-materiale basati sulla deformazione con elevati livelli di programmabilità”, afferma Janbaz. “Abbiamo combinato approcci di progettazione razionale basati su modelli predittivi di calcolo con tecniche di produzione additiva multi-materiale avanzate per materiali di stampa 3D con materiali cellulari e distribuzioni arbitrarie di materiali morbidi e duri nelle parti centrali e angolari delle loro celle. Utilizzando la geometria e la distribuzione spaziale delle proprietà del materiale come principali parametri di progetto, abbiamo sviluppato metamateriali meccanici morbidi che si comportano come meccanismi la cui forza di attuazione e ampiezza di attuazione potrebbero essere regolate. “
“Quello che vuoi veramente è qualcosa che assomiglia alle caratteristiche della mano umana incluso il tocco morbido, i movimenti rapidi ma accurati e la potenza”, ha affermato il professor Amir Zadpoor. “Ed è quello che i nostri morbidi materiali programmabili stampati in 3D cercano di ottenere.”