Gli attuatori sono dispositivi complessi che controllano meccanicamente i sistemi robotici in risposta ai segnali elettrici ricevuti. A seconda dell’applicazione specifica per cui vengono utilizzati, gli attuatori robot di oggi devono essere ottimizzati per una varietà di caratteristiche, come aspetto, efficienza, flessibilità, consumo energetico e peso, e tutti questi parametri devono essere calcolati manualmente dai ricercatori per trovare il giusto design; aggiungi la stampa 3D con più materiali per rendere un prodotto e le cose ancora più complicate. Questo ovviamente lascia molto spazio aperto per l’errore umano.
Ma un team di ricercatori del MIT – che conosce una o due cose sugli attuatori per la stampa 3D – ha sviluppato un sistema automatizzato in grado di progettare e stampare attuatori 3D ottimizzati per molte specifiche. Fondamentalmente, questo sistema sta completando un’attività troppo complessa per i ricercatori per fare alla vecchia maniera.
“Il nostro obiettivo finale è quello di trovare automaticamente un design ottimale per qualsiasi problema e quindi utilizzare l’output del nostro design ottimizzato per fabbricarlo. Passiamo dalla selezione dei materiali di stampa, alla ricerca del design ottimale, alla fabbricazione del prodotto finale in modo quasi completamente automatizzato “, ha dichiarato il subramano Sundaram PhD ’18, ex studente laureato presso il Computer Science and Artificial Intelligence Laboratory ( CSAIL ) del MIT .
Sundaram è il primo autore di un documento, intitolato ” Ottimizzazione della topologia e stampa 3D di attuatori e display magnetici multimateriali “, pubblicato su Science Advances ; altri autori sono l’ex MIT postdoc Melina Skouras; David S. Kim, ex ricercatore del Computational Fabrication Group ; Louise van den Heuvel ’14, SM ’16; e Wojciech Matusik, capo del Computational Fabrication Group e professore associato del MIT in ingegneria elettrica e informatica.
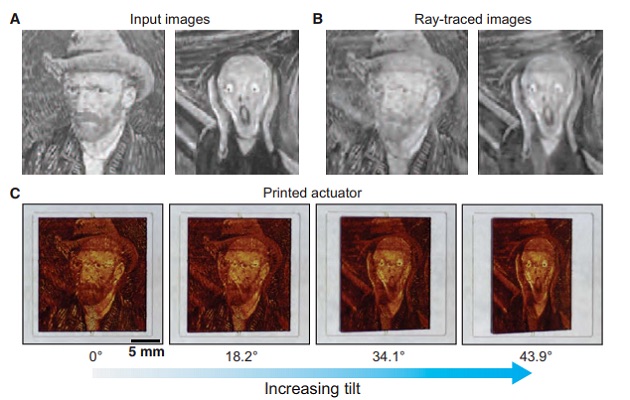
Per mostrare come funziona il loro sistema, i ricercatori lo hanno utilizzato per creare attuatori che mostrano due immagini in bianco e nero con diverse angolazioni. Quando è piatto, un attuatore mostra un ritratto di Vincent van Gogh, ma inclinato di un angolo una volta attivato, l’immagine si sposta sul famoso dipinto di Edvard Munch “The Scream”. Un altro esempio che hanno creato sono ninfee galleggianti stampate in 3D, che presentano petali che hanno matrici e cerniere dell’attuatore che si piegano in risposta a campi magnetici che attraversano fluidi conduttivi.
Quando vengono utilizzati più materiali per stampare in 3D un prodotto, la dimensionalità del design diventa piuttosto elevata.
Sundaram ha spiegato: “Ciò che ti rimane è quella che viene chiamata” esplosione combinatoria “, dove essenzialmente hai così tante combinazioni di materiali e proprietà che non hai la possibilità di valutare ogni combinazione per creare una struttura ottimale.”
Tre materiali polimerici sono stati personalizzati con le proprietà specifiche di colore, magnetizzazione e rigidità necessarie per costruire gli attuatori, producendo un materiale flessibile opaco usato come cerniera, un materiale di nanoparticelle marrone che risponde a un segnale magnetico e un rigido quasi trasparente Materiale. Quindi, i dati di caratterizzazione vengono aggiunti in una libreria di proprietà e il sistema ne attinge per assegnare vari materiali per riempire diversi voxel. Le immagini in scala di grigio, come l’attuatore piatto che mostra il ritratto di van Gogh fino a quando non viene inclinato in “The Scream”, vengono utilizzate come input di sistema.
Quindi, attraverso una sorta di processo di prova ed errore, 5,5 milioni di voxel vengono “riconfigurati iterativamente” in una simulazione per abbinare un’immagine specifica e “incontrare un angolo misurato”. Se la disposizione dei voxel non ritrae le immagini di destinazione, entrambi a un angolo e diritto, un segnale di errore indica al sistema quali voxel sono corretti e quali devono essere cambiati. Ad esempio, se i voxel magnetici marroni vengono spostati, rimossi o aggiunti, l’angolo dell’attuatore cambierà quando viene applicato un campo magnetico, ma deve essere preso in considerazione anche il modo in cui questo allineamento influirà sull’immagine target.
Una tecnica di computer grafica chiamata “ray-tracing”, che simula il percorso della luce che interagisce con gli oggetti, è stata utilizzata per calcolare le apparenze degli attuatori ad ogni iterazione. Questi fasci simulati brillano attraverso l’attuatore su ciascuna colonna voxel, che può contenere oltre 100 voxel. Se un attuatore è piatto, il raggio produce un tono scuro brillando verso il basso su una colonna con molti voxel marroni. Ma quando è inclinato, i voxel disallineati si illuminano e i voxel chiari possono spostarsi nel raggio, mentre quelli marroni si allontanano, quindi appare un tono più chiaro.
“Stiamo confrontando l’aspetto di quella [colonna voxel] quando è piatta o quando è intitolata, per abbinare le immagini target. Altrimenti, puoi scambiare, diciamo, un voxel chiaro con uno marrone. Se questo è un miglioramento, manteniamo questo nuovo suggerimento e apportiamo ripetutamente altre modifiche “, ha spiegato Sundaram.
Il sistema MIT utilizza il ray-tracing per allineare le colonne voxel chiare e scure nei punti appropriati per le immagini piatte e angolate. Alla fine, dopo poche decine di ore e 100 milioni di iterazioni, il posizionamento corretto di ciascun materiale in ciascun voxel genera due immagini a due angoli.
Una stampante 3D personalizzata con tecnologia a getto d’inchiostro drop-on-demand viene utilizzata per realizzare l’attuatore. Vasche di diversi materiali sono collegate a testine di stampa con ugelli controllati individualmente e il materiale designato viene fatto cadere, strato per strato, in ciascuno dei voxel.
Sundaram afferma che il loro lavoro potrebbe essere un passo nella giusta direzione per la progettazione di grandi strutture come le ali degli aeroplani. Gli attuatori che sono stati ottimizzati per l’aspetto e la funzione potrebbero anche essere utilizzati per la biomimetica nella robotica.
Sundaram ha dichiarato: “Puoi immaginare robot sottomarini con interi array di attuatori che ricoprono la superficie delle loro pelli, che possono essere ottimizzati per il trascinamento e la rotazione in modo efficiente, e così via.”
Ottimizzazione del pannello per le proprietà ottiche e meccaniche, data una coppia di immagini in scala di grigi target. 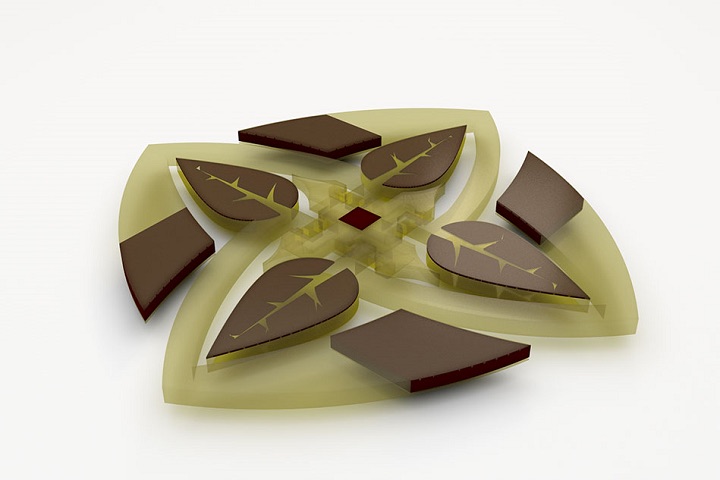
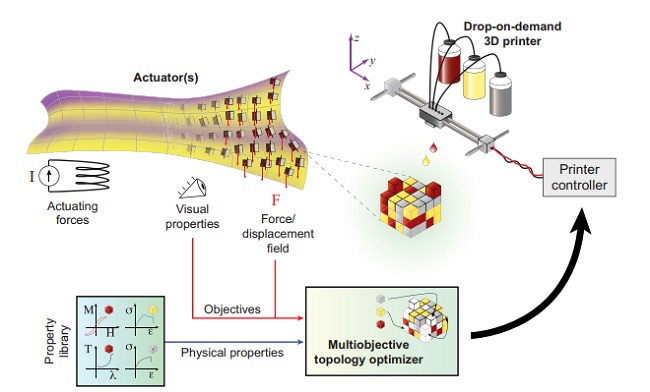
Panoramica del processo di stampa 3D basato sulle specifiche. La struttura dei singoli attuatori (o la disposizione di più attuatori) è ottimizzata mediante un processo di ottimizzazione della topologia multi-obiettivo. L’ottimizzazione utilizza le proprietà fisiche in blocco dei singoli materiali e gli obiettivi funzionali come input. La rappresentazione della struttura basata su voxel ottimizzata generata viene utilizzata dalla stampante per fabbricare la struttura ottimizzata mediante un processo di stampa a getto d’inchiostro drop-on-demand. Un polimero di acrilato rigido (RIG), un polimero di acrilato elastico (ELA) e una nanoparticella magnetica (Fe3O4) / composito polimerico (MPC) sono i materiali utilizzati. Il contrasto nelle proprietà ottiche, meccaniche e magnetiche viene utilizzato per ottimizzare simultaneamente l’aspetto visivo e le forze di attuazione generando al contempo un design a livello di voxel.