Le pinze morbide consentono ai robot di manipolare oggetti delicati , ma questo non significa necessariamente che siano sicuri da usare intorno agli organismi viventi, come gli anziani, quindi i ricercatori continuano a lavorare per migliorare la percezione delle pinze robotiche morbide . Secondo un team della Ritsumeikan University in Giappone, uno degli obiettivi principali della robotica in questo momento è lo sviluppo di un’abile pinza robotica con capacità più sicure e più simili a quelle umane. I ricercatori hanno lavorato per progettare dita robotiche morbide e sensibili stampate in 3D che rappresenterebbero un passo importante nella giusta direzione verso robot più sicuri e recentemente hanno pubblicato uno studio sul loro lavoro sulla rivista Nano Energy .
L’abstract afferma: “La sensazione propriocettiva tramite sensori flessibili incorporati è essenziale per le pinze robotiche morbide per realizzare una presa sicura e abile. Dimostriamo un sensore multifunzionale autoalimentato e flessibile combinando un film di difluoruro di polivinilidene con uno strato di jamming microstrutturato. Gli strati di inceppamento e il corpo del dito sono fabbricati con una tecnologia di stampa 3D multimateriale. “
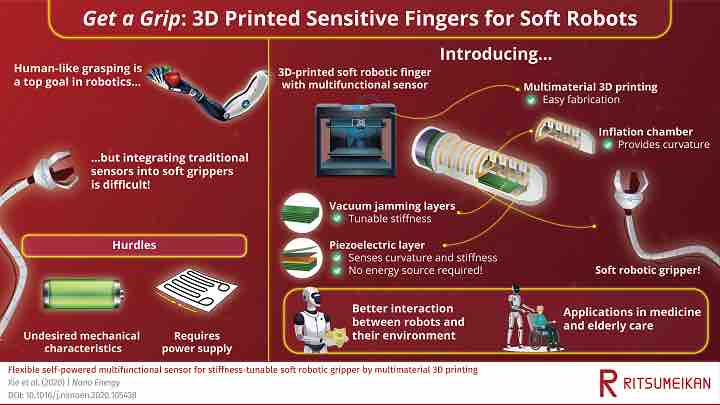
Per completare varie attività, le pinze morbide dovrebbero avere un senso della propria posizione e dei propri movimenti, noto come propriocezione, ma i sensori sono una parte importante di questo processo e la maggior parte dei sensori esistenti sono troppo rigidi per essere integrati in modo utile, come secondo un comunicato di Ritsumeikan, “compromettono le caratteristiche meccaniche delle parti molli”. Ma questo team, sotto la guida del Professore Associato Mengying Xie, ha utilizzato la stampa 3D multimateriale per realizzare morbide dita robotiche dotate di un sensore di propriocezione integrato con rigidità regolabile.
“Il sensore integrato nel dito morbido può fornire sensazioni propriocettive passive di curvatura e rigidità, con sensibilità massima rispettivamente di 0,55 mV me 0,09 Vm / N. Agiva anche come elemento di disturbo attivo per regolare la rigidità delle dita (15–44 N / m) senza influenzare la dinamica del movimento robotico. Dimostriamo che il sensore multifunzionale con una pinza robotica a tre dita registra con successo la flessione e l’irrigidimento delle dita nel processo di “presa e posizionamento” “, continua l’abstract.
Un paio di funzioni speciali consentono alla pinza robotica morbida stampata in 3D, dotata di tre dita, di afferrare e trattenere gli oggetti. Innanzitutto, il dito morbido della squadra può piegarsi in modo molto controllabile grazie a una camera di gonfiaggio rinforzata e alla pressione dell’aria che fornisce. Una camera separata è dotata di un vuoto, che è in grado di regolare la rigidità del dito attraverso l’inceppamento del vuoto: un processo che aspira l’aria da più strati sovrapposti di materiale flessibile per renderlo rigido. Ancora più interessante è lo strato piezoelettrico che è stato aggiunto ai materiali flessibili nella camera di blocco del vuoto, che funge da sensore.
L’effetto piezoelettrico cambia la tensione quando il materiale è sotto pressione, il che ha dato ai ricercatori un modo per usarlo a proprio vantaggio come meccanismo in grado di rilevare la rigidità e la curvatura iniziali del dito robotico. Uno strato microstrutturato nella camera a vuoto aumenta ulteriormente la sensibilità della pinza morbida stampata in 3D, poiché migliora il modo in cui la pressione viene distribuita sul materiale piezoelettrico. L’effetto piezoelettrico consente inoltre al sensore di autoalimentarsi, il che significa che non ha bisogno di una fornitura di energia.
Il professor Xie ha affermato: “I sensori integrati autoalimentati non solo consentiranno ai robot di interagire in sicurezza con gli esseri umani e il loro ambiente, ma elimineranno anche le barriere alle applicazioni robotiche che attualmente si basano su sensori alimentati per monitorare le condizioni”.
La stampa 3D multimateriale è ciò che ha permesso al team di integrare facilmente i meccanismi di rigidità e regolazione del rilevamento nel design della pinza morbida, che renderà le dita più sicure da usare quando si manipolano oggetti fragili, come farebbero nel campo sanitario.
“Il nostro lavoro suggerisce un modo di progettare sensori che contribuiscono non solo come elementi di rilevamento per applicazioni robotiche, ma anche come materiali funzionali attivi per fornire un migliore controllo dell’intero sistema senza comprometterne il comportamento dinamico”, ha affermato il professor Xie.