Boston Dynamics Dog ottiene una replica robotizzata stampata in 3D – ed è open source
Abbiamo visto i robot 3D stampati che sono in grado di completare un gran numero di compiti, da tatuare il braccio di una persona e che squilla un gong a passare l’aspirapolvere , la costruzione di case , e falciare il prato . Ma i robot che sono in grado di eseguire movimenti complessi, come saltare, camminare e navigare su diversi tipi di terreno, sono troppo costosi o troppo semplici per fare molto bene. Ma un nuovo robot open source potrebbe cambiare questo.
I ricercatori della Tandon School of Engineering della NYU , del suo Machines in Motion Laboratory e del Max Planck Institute for Intelligent Systems (MPI-IS) della Germania hanno lavorato insieme per creare un robot quadruplo, chiamato Solo 8, grosso modo grosso come un cane, veloce e facile da montare, relativamente economico e per nulla inquietante . Ma la cosa migliore del robot è che è open source, il che significa che altri laboratori di ricerca possono facilmente replicarlo e modificarlo.

Esempi di sequenze di movimenti: a) Le gambe possono alternare tra tutte e quattro le configurazioni del ginocchio, b) con una capacità di rotazione dell’articolazione dell’anca superiore a 360 ° e poco spazio per navigare, le gambe possono essere ruotate prima all’indietro, quindi su un gradino, c) nel caso il robot cade sulla schiena, può ri-orientare le gambe e alzarsi senza ruotare il tronco.
Ludovic Righetti , professore associato di ingegneria elettrica e informatica e ingegneria meccanica e aerospaziale presso la NYU Tandon, ha guidato il team collaborativo Solo 8 nella sua missione per rendere più accessibile l’insegnamento e la ricerca di robotica. Sostenuti dall’Open Dynamic Robot Initiative , gli investigatori di Righetti e MPI-IS Felix Grimminger e Alexander Badri-Spröwitz hanno iniziato il progetto nel 2016 con il finanziamento di ERC Starting Grant di Righetti.
Avanzamento veloce fino ai giorni nostri e un documento sul loro lavoro, che è stato accettato per la pubblicazione sulla rivista Lettere di robotica e automazione , è stato recentemente presentato alla conferenza internazionale virtuale sulla robotica e l’automazione ( ICRA ).
“Presentiamo un nuovo sistema robotizzato a gambe aperte con controllo della coppia, con un modulo attuatore a basso costo e di bassa complessità al centro”, afferma l’astratto. “Presentiamo anche un nuovo sensore di contatto del piede adatto alla locomozione delle gambe con urti violenti. Un robot quadrupede da 2,2 kg con un’ampia gamma di movimento è assemblato da otto moduli attuatori identici e quattro gambe inferiori con sensori di contatto del piede. Sfruttando la stampa 3D in plastica standard e le parti pronte all’uso si ottiene un robot leggero ed economico, che consente una rapida distribuzione e duplicazione all’interno della comunità di ricerca. “
Solo 8 si comporta come un robot molto più costoso: i suoi giunti azionati e i motori a controllo di coppia gli consentono di camminare in diverse direzioni, saltare e riprendersi in caso di caduta.
“Solo ha alcune nuove funzionalità che siamo interessati a esplorare in futuro. Ha una vasta gamma di movimenti, ad esempio “, ha affermato Grimminger. “Quando il robot cade sulla schiena, può configurare le gambe dall’altra parte e alzarsi in piedi. Oppure può saltare fino a 65 cm da un’altezza di 24 cm. “
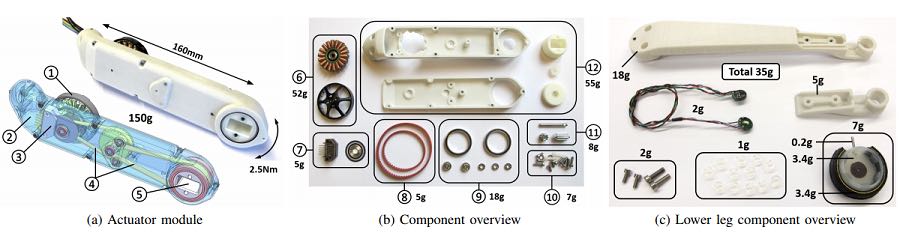
Modulo attuatore senza spazzole (a) assemblato, (b) singole parti. Motore BLDC (1), struttura a conchiglia stampata in 3D in due parti (2), encoder ad alta risoluzione (3), cinghie dentate (4) e albero di uscita (5). Motore brushless (6), encoder ottico (7), cinghie dentate (8), cuscinetti (9), elementi di fissaggio (10), parti lavorate (11) e parti stampate in 3D (12). Ad eccezione di 11, tutte le parti sono standard o stampabili in 3D. L’albero del motore e le pulegge (11) possono essere lavorati con materiale grezzo. (c) Componenti dell’interruttore di contatto della parte inferiore della gamba e del piede.
Con un peso di poco più di due chilogrammi, Solo 8 ha un rapporto peso / potenza maggiore rispetto alla maggior parte degli altri robot quadrupede, il che lo rende più sicuro e più facile da maneggiare in laboratorio, e puoi persino trasportarlo in uno zaino. Tutti i suoi componenti possono essere acquistati o stampati in 3D e il team ha reso disponibili i file di costruzione gratuitamente su GitHub con la licenza di 3 clausole BSD. Altri ricercatori trarranno vantaggio dalla decisione del team di progettare il robot come piattaforma open source, in quanto saranno in grado di raccogliere e condividere i dati dei propri esperimenti, portando a progressi più rapidi nel campo della robotica.
Righetti ha dichiarato: “Già molte università si sono avvicinate a noi e desiderano fare una copia del nostro robot e utilizzarlo come piattaforma di ricerca”.
Un esempio è il dipartimento di inferenza empirica di MPI-IS che utilizza la piattaforma per sviluppare dita robotiche in grado di manipolare oggetti. Altre potenziali aree di ricerca includono la locomozione estremamente dinamica, come il comportamento del parkour; studio del movimento degli arti basato su animali; manipolazione ambientale, come la pressione di pulsanti; integrazione di robot con tecnologia di comunicazione avanzata; e l’apprendimento di rinforzo per comportamenti dinamici e complessi.
“La nostra piattaforma robot è un’ottima base per prototipare e costruire rapidamente hardware ad alte prestazioni. In cambio, ne beneficiamo, perché altri ricercatori possono contribuire al progetto; ad esempio, i colleghi del LAAS-CNRS in Francia hanno sviluppato una scheda elettronica per aiutare a comunicare con il robot tramite WiFi. Inoltre, algoritmi di controllo e apprendimento complessi possono essere rapidamente testati sulla piattaforma, riducendo il tempo dall’idea alla convalida sperimentale “, ha spiegato Righetti. “Semplifica notevolmente la nostra ricerca e il nostro approccio open source ci consente di confrontare gli algoritmi con altri laboratori. Nel mio laboratorio qui a New York, abbiamo sviluppato algoritmi di ottimizzazione del movimento molto efficienti, ma testarli su un robot complesso e pesante può facilmente richiedere un anno e mezzo di lavoro per diversi ricercatori, mentre questo può essere fatto più facilmente con Solo.
Quindi, come è andata la squadra a creare Solo 8? Badri-Spröwitz ha affermato di aver richiesto “una vasta gamma di competenze” e diversi anni di duro lavoro:
“La nostra piattaforma è la conoscenza combinata di diversi team. Ora qualsiasi laboratorio in tutto il mondo può andare online, scaricare i file e stampare le parti e acquistare i componenti rimanenti dal catalogo. E tutti possono aggiungere funzionalità extra, entro poche settimane. Fatto, ti sei procurato un robot di classe mondiale. “
Ma tutto quel lavoro ha dato i suoi frutti, poiché Badri-Spröwitz stima che altri team di ricerca possano facilmente creare le proprie versioni di Solo 8 per poche migliaia di euro. Il robot prende il nome dai suoi otto giunti azionati, che consentono a ciascuna gamba di cambiare lunghezza e angolo; tuttavia, sono stati condotti test sull’ultima versione del robot con tre gradi di libertà per gamba, per un totale di 12. Questo lo rende molto più versatile e in grado di eseguire comportamenti più complessi, come ad esempio fare un passo di lato.
Presenta anche motori a controllo di coppia, che agiscono come i tendini e i muscoli elastici di una gamba di un animale – ciò consente a Solo 8 di muoversi con “un comportamento simile a una molla”.
“Si noti che il robot utilizza molle virtuali, non meccaniche. E come molle virtuali, possono essere programmati ”, ha spiegato Badri-Spröwitz. “Ad esempio, puoi regolare la rigidità della molla da morbida a dura, il che è interessante perché vediamo una rigidità variabile negli esseri umani e negli animali e con una rigidità regolata il robot raggiunge un comportamento di locomozione adattivo e robusto.”
I progetti open source come questo sono davvero in linea con l’etica della comunità dei creatori: condividendo le nostre conoscenze con gli altri, anziché tenerle per noi, possiamo lavorare insieme per ottenere grandi cose e persino salvare vite .