Robot simili a meduse potrebbero un giorno ripulire gli oceani del mondo
Una versatile piattaforma robotica simile a una medusa per un’efficace propulsione e manipolazione subacquea
Stoccarda – La maggior parte del mondo è ricoperta da oceani, purtroppo altamente inquinati. Una delle strategie per combattere i cumuli di rifiuti che si trovano in questi ecosistemi molto sensibili, specialmente intorno alle barriere coralline, è impiegare robot per padroneggiare la pulizia. Tuttavia, i robot sottomarini esistenti sono per lo più ingombranti con corpi rigidi, incapaci di esplorare e campionare in ambienti complessi e non strutturati e sono rumorosi a causa di motori elettrici o pompe idrauliche. Per un progetto più adatto, gli scienziati del Max Planck Institute for Intelligent Systems (MPI-IS) di Stoccarda si sono ispirati alla natura. Hanno configurato un robot ispirato alle meduse, versatile, efficiente dal punto di vista energetico e quasi privo di rumore delle dimensioni di una mano. Jellyfish-Bot è una collaborazione tra i dipartimenti Physical Intelligence e Robotic Materials di MPI-IS. “A Versatile Jellyfish-like Robotic Platform for Effective Underwater Propulsion and Manipulation ” è stato pubblicato su Science Advances.
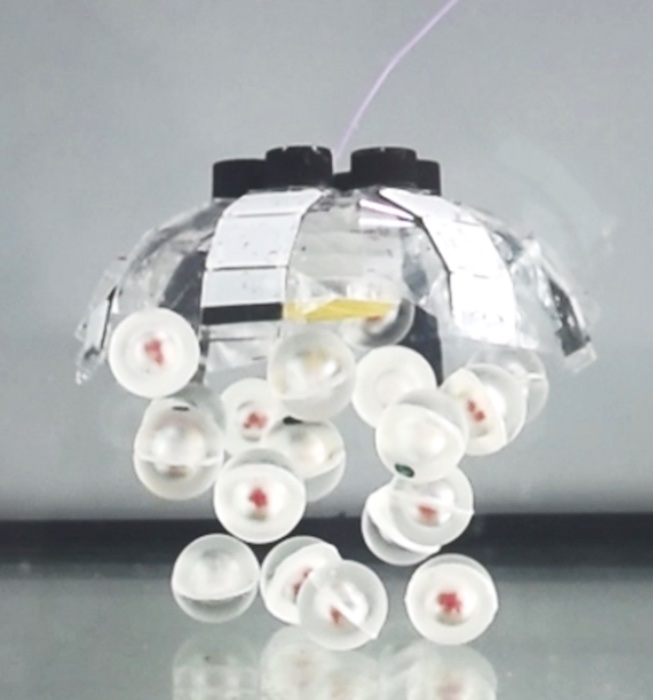
Per costruire il robot, il team ha utilizzato attuatori elettroidraulici attraverso i quali scorre l’elettricità. Gli attuatori fungono da muscoli artificiali che alimentano il robot. Intorno a questi muscoli ci sono cuscini d’aria e componenti morbidi e rigidi che stabilizzano il robot e lo rendono impermeabile. In questo modo, l’alta tensione che attraversa gli attuatori non può entrare in contatto con l’acqua circostante. Un alimentatore fornisce periodicamente elettricità attraverso fili sottili, provocando la contrazione e l’espansione dei muscoli. Ciò consente al robot di nuotare con grazia e creare vortici sotto il suo corpo.
“Quando una medusa nuota verso l’alto, può intrappolare oggetti lungo il suo percorso mentre crea correnti attorno al suo corpo. In questo modo, può anche raccogliere sostanze nutritive. Anche il nostro robot fa circolare l’acqua intorno a sé. Questa funzione è utile per raccogliere oggetti come particelle di rifiuti. Può quindi trasportare la lettiera in superficie, dove può essere successivamente riciclata. È anche in grado di raccogliere campioni biologici fragili come le uova di pesce. Nel frattempo, non vi è alcun impatto negativo sull’ambiente circostante. L’interazione con le specie acquatiche è delicata e quasi priva di rumore”, spiega Tianlu Wang. È postdoc presso il Dipartimento di Intelligenza Fisica presso MPI-IS e primo autore della pubblicazione.
Il suo coautore Hyeong-Joon Joo del Robotic Materials Department continua: “Si stima che il 70% dei rifiuti marini affondi sul fondo del mare. La plastica costituisce oltre il 60% di questi rifiuti, impiegando centinaia di anni per degradarsi. Pertanto, abbiamo visto l’urgente necessità di sviluppare un robot per manipolare oggetti come i rifiuti e trasportarli verso l’alto. Speriamo che un giorno i robot sottomarini possano aiutare a ripulire i nostri oceani”.
I Jellyfish-Bot sono in grado di muovere e intrappolare oggetti senza contatto fisico, operando da soli o con diversi in combinazione. Ogni robot funziona più velocemente di altre invenzioni comparabili, raggiungendo una velocità fino a 6,1 cm/s. Inoltre, Jellyfish-Bot richiede solo una bassa potenza in ingresso di circa 100 mW. Ed è sicuro per gli esseri umani e per i pesci se un giorno il materiale polimerico che isola il robot dovesse rompersi. Nel frattempo, il rumore del robot non può essere distinto dai livelli di fondo. In questo modo Jellyfish-Bot interagisce delicatamente con il suo ambiente senza disturbarlo, proprio come la sua controparte naturale.
Il robot è composto da diversi strati: alcuni irrigidiscono il robot, altri servono a tenerlo a galla o ad isolarlo. Un ulteriore strato di polimero funziona come una pelle galleggiante. Muscoli artificiali alimentati elettricamente noti come HASEL ssono incorporati nel mezzo dei diversi strati. Gli HASEL sono sacchetti di plastica riempiti con dielettrico liquido parzialmente coperti da elettrodi. L’applicazione di un’alta tensione attraverso un elettrodo lo carica positivamente, mentre l’acqua circostante viene caricata negativamente. Questo genera una forza tra l’elettrodo caricato positivamente e l’acqua caricata negativamente che spinge l’olio all’interno delle sacche avanti e indietro, provocando la contrazione e il rilassamento delle sacche, simile a un vero muscolo. Gli HASEL possono sostenere le elevate sollecitazioni elettriche generate dagli elettrodi caricati e sono protetti dall’acqua da uno strato isolante. Questo è importante, poiché i muscoli HASEL non sono mai stati usati prima per costruire un robot subacqueo.
Il primo passo è stato sviluppare Jellyfish-Bot con un elettrodo con sei dita o braccia. Nella seconda fase, il team ha diviso il singolo elettrodo in gruppi separati per attivarli in modo indipendente.
“Abbiamo ottenuto la presa di oggetti facendo funzionare quattro dei bracci come un’elica e gli altri due come una pinza. Oppure abbiamo azionato solo un sottoinsieme dei bracci, per guidare il robot in diverse direzioni. Abbiamo anche esaminato come possiamo far funzionare un collettivo di diversi robot. Ad esempio, abbiamo preso due robot e abbiamo lasciato che prendessero una maschera, il che è molto difficile per un singolo robot da solo. Due robot possono anche cooperare per trasportare carichi pesanti. Tuttavia, a questo punto, il nostro Jellyfish-Bot ha bisogno di un cavo. Questo è uno svantaggio se vogliamo davvero usarlo un giorno nell’oceano”, afferma Hyeong-Joon Joo.
Forse i cavi che alimentano i robot saranno presto un ricordo del passato. “Il nostro obiettivo è sviluppare robot wireless. Fortunatamente, abbiamo compiuto il primo passo verso questo obiettivo. Abbiamo incorporato tutti i moduli funzionali come la batteria e le parti di comunicazione wireless in modo da consentire future manipolazioni wireless”, continua Tianlu Wang. Il team ha collegato un’unità di galleggiamento nella parte superiore del robot e una batteria e un microcontrollore nella parte inferiore. Hanno quindi portato la loro invenzione a fare una nuotata nello stagno del campus Max Planck di Stoccarda e sono riusciti a guidarla con successo. Finora, tuttavia, non sono stati in grado di indirizzare il robot wireless a cambiare rotta e nuotare nella direzione opposta.
Conoscendo la squadra, non ci vorrà molto per raggiungere questo obiettivo.