I ricercatori della School of Mechanical Engineering della Purdue University hanno sviluppato un nuovo approccio di modellistica innovativo per applicazioni come la consegna di farmaci in applicazioni biomediche. Descrivendo in dettaglio la loro ricerca nei ” Microrobot stampati in 3D con colori strutturali integrati per identificazione e tracciamento “, gli autori ci danno un’idea di nuovi modelli sulla micro e nanoscala usando la polimerizzazione a due fotoni (TPP), una tecnica che offre submicron risoluzione.
Mentre i microrobot (divisi in gruppi biologici, ibridi e sintetici) sono utili in applicazioni come la micromanipolazione e il rilevamento avanzato, ci sono ancora ostacoli nello sviluppo di strutture in miniatura a causa della necessità di combinare attuazione e controllo wireless all’interno di un dispositivo. La dimensione è il problema in molti casi, sebbene l’attuazione sia spesso fornita esternamente. Ci sono anche grandi sfide per i processi in vitro e in vivo con l’uso di sistemi microrobotici, effetti visivi e tracciamento.
“Per i microrobot stampati in 3D con dimensioni inferiori, sono necessari approcci di fabbricazione alternativi per integrare caratteristiche distintive di tracciamento, tra cui la marcatura delle superfici dei microrobot con materiali fluorescenti come punti quantici o l’utilizzo di fluorofori attaccati selettivamente a gruppi funzionali specifici”, hanno affermato i ricercatori. “Nonostante il loro successo nel monitoraggio, questi materiali perdono la loro fluorescenza nel tempo, limitando la loro durata di utilità.”
In questo studio, il colore gioca un ruolo importante, con modelli costituiti da matrici di prismi che puntano verso l’alto, consentendo al team di integrarli in diverse aree del microrobot. I modelli sono stati sviluppati come segue:
Modello rosso: blocca con un ingombro di 160 nm x 170 nm
Modello verde: blocchi con un ingombro di 120 nm x 90 nm
Le matrici su entrambi i microrobot a elica e piattaforma sono costituite da tutti i blocchi rosso (R), tutto verde (G) o rosso e verde alternato (RG)
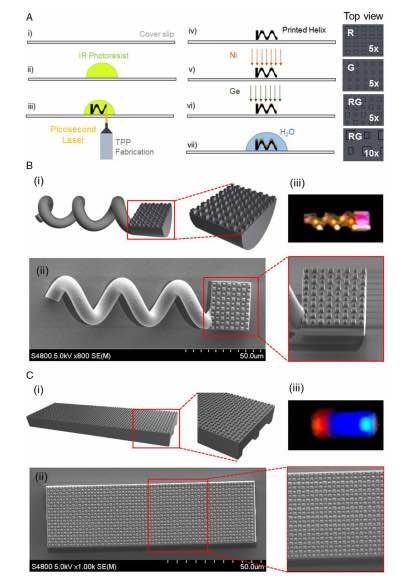
Fabbricazione e caratterizzazione di microrobot stampati in 3D con caratteristiche strutturali colorate. A) Processo di fabbricazione dei microrobot stampati in 3D: (i) – (iii) il fotoresist IP-DIP viene depositato su un vetrino e i microrobot vengono stampati utilizzando un sistema di fabbricazione TPP (Nanoscribe Photonic Professional GT); (iv) rimozione di fotoresist non polimerizzato; (v) – (vi) Ni e Ge sono depositati sequenzialmente (100 e 35 nm, rispettivamente) sulle strutture a 2 Å sx1; (vii) i microrobot vengono spostati in una soluzione acquosa e successivamente rilasciati utilizzando una micropipetta. B) (i) Progettazione CAD di microrobot elicoidali con un’area colorata strutturale situata sulla superficie superiore della testa dell’elica. Diversi modelli di celle unitarie includono, G e RG, basati sulle dimensioni di Nagasaki et al. [41]. (ii) Immagine al microscopio elettronico a scansione (SEM) di un singolo microrobot elicoidale con 10 schemi RG e (iii) immagine ottica della stessa struttura sotto luce bianca che esprime colore. C) (i) Immagine CAD del design del microrobot della piattaforma di controllo con un modello cromatico strutturale. (ii) Immagine SEM della piattaforma di controllo con 5 modelli RG e (iii) immagine ottica della stessa struttura sotto luce bianca che esprime colore. (Nota: valore di saturazione durante l’acquisizione dell’immagine ottica: 4, secondo il software Pylon Viewer di Basler).
A seconda della sorgente luminosa, i colori espressi possono variare. Gli autori hanno notato che per aggiungere il contrasto cromatico, hanno usato uno strato dielettrico ad alto indice di Ge; tuttavia, il risultato in campioni per lo studio è stato solo “minimo”. La sorgente luminosa è stata impostata in una posizione fissa e quindi ruotata a mano, con le immagini registrate ogni volta che si verificava un sostanziale cambiamento di colore.
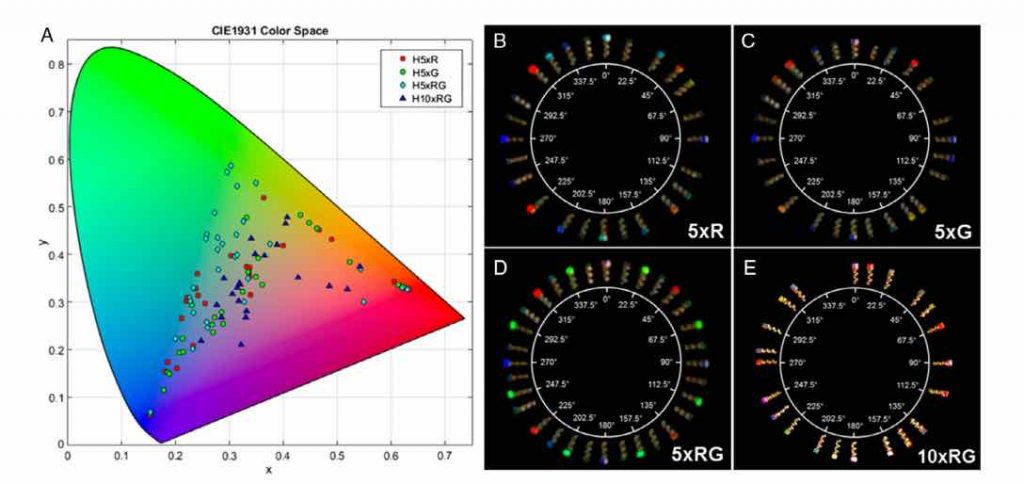
Caratterizzazione del colore strutturale. A) Colore espresso dai microrobot elicoidali tracciati nello spazio colore CIE1931 usando i valori RGB ottenuti da ImageJ. Immagine ottica del colore espresso rispetto all’angolo dei microrobot elicoidali: B) 5 x R, C) 5 x G, D) 5 x RG ed E) 10 x RG.
“Il modello RG ha mostrato di esprimere uno spettro più ampio di colori rispetto ai soli modelli R e G”, hanno affermato i ricercatori. “I motivi R e G esprimevano solo colori vivaci di blu e rosso, mentre RG esprimeva inoltre verde brillante.
“La regolazione fine dell’espressione del colore in base all’angolo applicato può potenzialmente fornire informazioni in tempo reale sulla posizione di un microrobot in entrambe le direzioni x-ye identificando la variazione di colore mentre si sta spostando nell’area di lavoro 3D.”
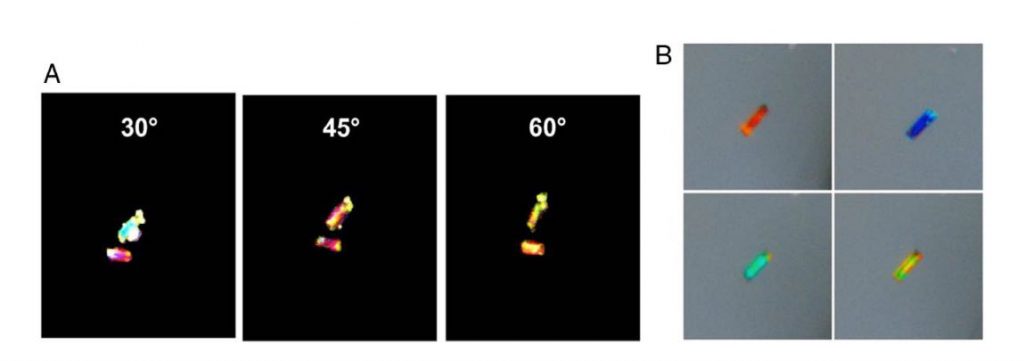
Colore strutturale rispetto all’inclinazione verticale. A) Rilasciato piattaforme di controllo su un wafer di silicio planarizzato inclinato di 30, 45 e 60 dal piano orizzontale. (Nota: lo sfondo dell’immagine è stato rimosso per maggiore chiarezza.) B) Piattaforme di controllo con un bordo fissato su un substrato trasparente e l’altro inclinato fuori dal piano in quantità diverse utilizzando campi magnetici con conseguente espressione di colori diversi. Per entrambe le parti (A) e (B), la lampada veniva mantenuta nella stessa posizione mentre le piattaforme erano inclinate.
I microswimmer elicoidali si basavano su campi magnetici rotanti per gli attuatori, mentre i microrobot della piattaforma di controllo utilizzavano campi a gradiente basandosi sul sistema a bobina MagnebotiX. I ricercatori hanno notato che quando le piattaforme di controllo ruotavano, il colore era visibile, così come sui robot elicoidali che utilizzavano basse frequenze. I ricercatori hanno notato tuttavia che il colore differiva a seconda dell’orientamento e della sorgente luminosa.
“La variazione delle dimensioni strutturali del blocco di colore è stata utilizzata per esplorare la capacità di manipolare l’espressione del colore. In questo studio, le geometrie dei blocchi alternati hanno fornito una gamma più ampia di colori rispetto alle matrici con un solo tipo di geometria dei blocchi “, hanno concluso i ricercatori. “Con la crescente precisione delle tecnologie di stampa micro-3D ed esplorando modelli complessi, è possibile ottenere colori noniridescenti.
“Questo è stato recentemente dimostrato per le strutture simili a lamelle stampate in 3D simili a quelle della farfalla Morpho, sebbene questo tipo di modello esprimesse solo un colore blu artificiale e non fosse applicato alle strutture durante lo spostamento. Esplorando nuove strutture progettate computazionalmente e integrandole in sistemi microrobotici 3D, il colore strutturale può diventare un elemento comune non solo per il tracciamento e l’identificazione, ma anche per la creazione di proprietà di superficie sintonizzabili. “
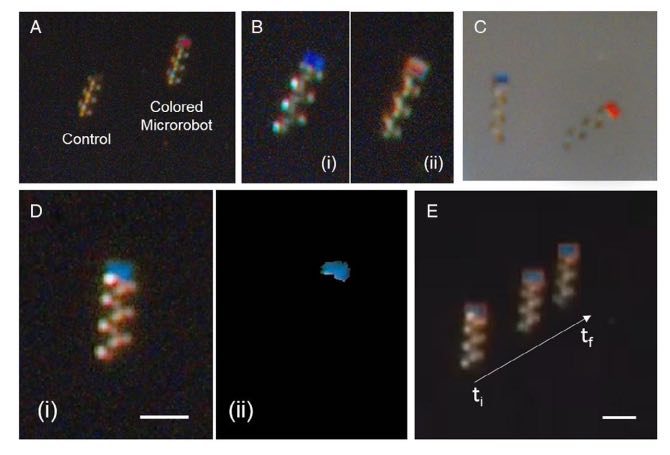
Monitoraggio del colore e valutazione del movimento. Immagini ottiche di A) un microrobot elicoidale con colore strutturale integrato sulla sua testa, che esprime un rosso, accanto a un microrobot di controllo senza nanopatternali integrati sulla sua testa; B) colore espresso a (i) basse e (ii) alte frequenze; C) due microrobot elicoidali colorati con diversi nanopattern su un substrato trasparente. D) Algoritmo di tracciamento basato sul colore applicato a un microrobot elicoidale colorato, in cui l’immagine ottica reale (i) è riconosciuta dall’algoritmo con la maschera di tracciamento del colore mostrata nell’immagine (ii). E) Compilazione del tracking del microrobot, con una posizione iniziale indicata da ti e la sua posizione finale come tf. Barra della scala, 50 micron.