Un gruppo di ricercatori del Massachusetts Institute of Technology, con contributi dell’École Polytechnique Fédérale de Lausanne e della University of Cincinnati, ha sviluppato un metodo per realizzare microstrutture morbide stampate in 3D che possono rispondere a un campo magnetico esterno. Il lavoro apre una direzione interessante per la microrobotica, la microfluidica e i materiali programmabili, perché consente di controllare non solo il movimento dell’intero oggetto, ma anche la risposta di singole parti all’interno della stessa struttura.
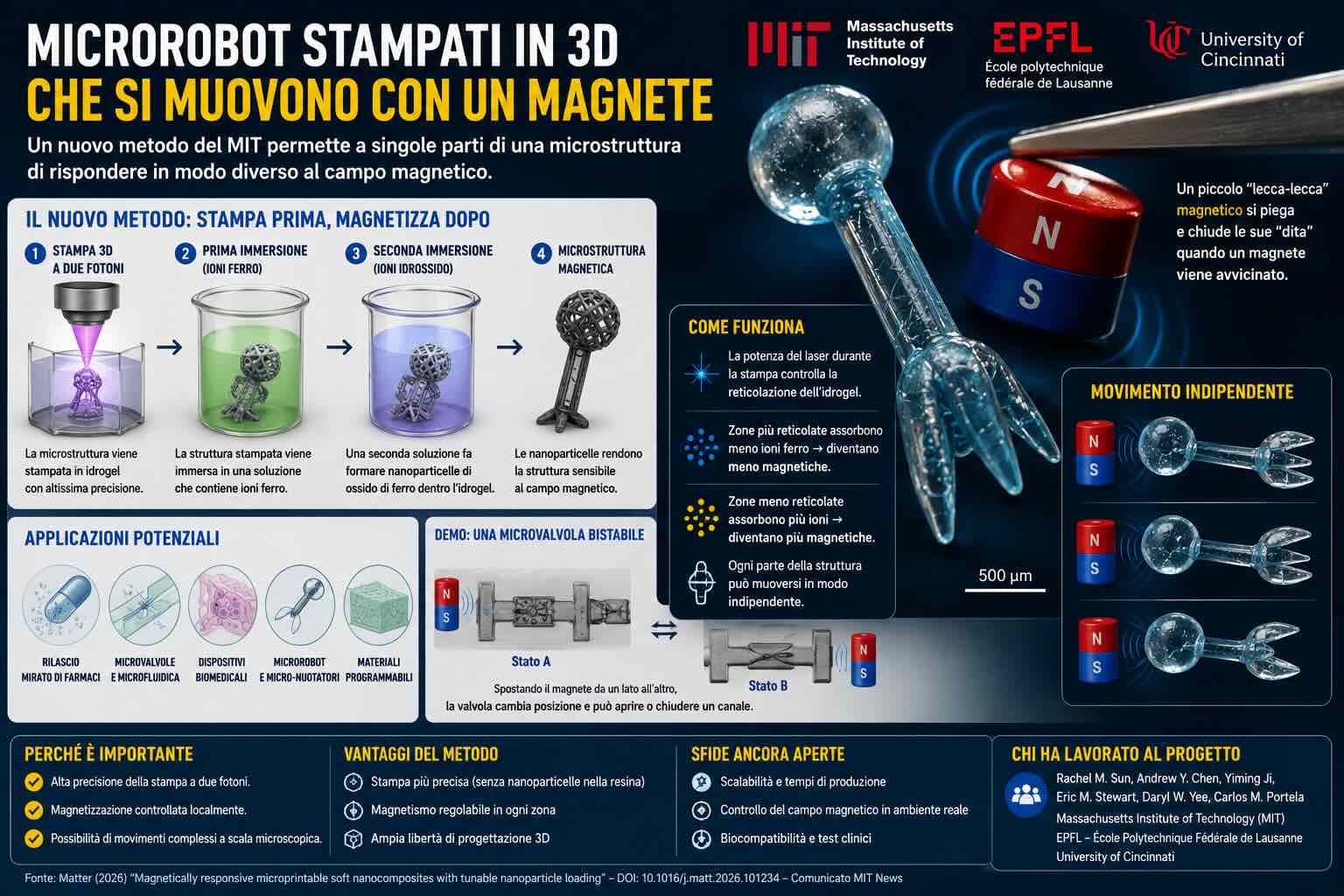
Il risultato è stato ottenuto combinando stampa 3D ad altissima risoluzione e un trattamento chimico successivo alla stampa. Invece di caricare la resina con particelle magnetiche prima del processo, i ricercatori stampano prima la microstruttura in un idrogel polimerico e introducono il magnetismo solo dopo, facendo crescere nanoparticelle di ossido di ferro all’interno del materiale.
Questa scelta risolve un problema tecnico importante. Nella microstampa 3D basata su polimerizzazione a due fotoni, la precisione dipende dal modo in cui il laser solidifica piccoli volumi di materiale. Se nella resina sono già presenti particelle metalliche o magnetiche, queste possono disperdere o assorbire la luce, interferendo con la formazione della struttura. Il risultato può essere una parte debole, incompleta o meno precisa. Separando stampa e magnetizzazione, il gruppo guidato dal MIT conserva la risoluzione del processo e aggiunge la funzione magnetica in una fase successiva.
Il problema della stampa diretta di materiali magnetici su scala micro
La produzione di microdispositivi magnetici è un campo complesso. A dimensioni millimetriche o centimetriche, inserire particelle magnetiche in una matrice polimerica è relativamente gestibile. A scala micrometrica, invece, la stessa strategia diventa difficile. Le particelle possono aggregarsi, sedimentare, disturbare la luce del laser o impedire la creazione di dettagli molto fini.
Questo è un limite serio per la stampa 3D a due fotoni, una tecnologia usata quando servono geometrie molto piccole e risoluzioni che non sono alla portata delle stampanti 3D convenzionali. Il laser non polimerizza un intero strato come nella stereolitografia classica: agisce in un punto estremamente localizzato, disegnando la struttura all’interno della resina. È proprio questa precisione a rendere possibile la produzione di microarchitetture complesse, reticoli, microlenti, microneedle, microattuatori e componenti per laboratorio su chip.
Quando però si prova ad aggiungere una grande quantità di nanoparticelle magnetiche nella resina, nasce un compromesso: più particelle significano una risposta magnetica più forte, ma anche più difficoltà di stampa. Meno particelle permettono una struttura più pulita, ma riducono la capacità di movimento sotto campo magnetico. Il lavoro del MIT prova a superare questo compromesso spostando il magnetismo fuori dalla fase di stampa.
Il metodo “double-dip”
Il processo sviluppato dal gruppo è descritto in modo semplice, ma richiede un controllo preciso dei materiali. La prima fase è la stampa 3D della microstruttura con un normale idrogel polimerico, senza particelle magnetiche. La struttura viene poi immersa in una soluzione contenente ioni ferro, che il gel è in grado di assorbire. In una seconda immersione, il pezzo viene esposto a ioni idrossido. A quel punto, gli ioni presenti nel gel reagiscono tra loro e formano nanoparticelle di ossido di ferro direttamente dentro la matrice polimerica.
Il vantaggio è duplice. Da un lato, il laser può lavorare su una resina più pulita, senza ostacoli ottici. Dall’altro, le particelle magnetiche si formano dentro la struttura già stampata, invece di essere disperse nella resina di partenza.
Questo non significa soltanto ottenere un oggetto magnetico. Il metodo permette anche di controllare quanto magnetica sarà una determinata zona. Il gruppo ha mostrato che modulando la potenza del laser durante la stampa è possibile cambiare la densità di reticolazione dell’idrogel. Una zona più reticolata assorbe meno ioni e genera meno nanoparticelle. Una zona meno reticolata assorbe più materiale e diventa più magneticamente attiva. In pratica, la risposta magnetica può essere programmata localmente durante la fase di progettazione e stampa.
Perché il movimento indipendente è importante
Molti microdispositivi magnetici già esistenti si muovono come un corpo unico. Il magnete esterno li trascina, li ruota o li guida in un fluido. Questo è utile per micro-nuotatori, eliche magnetiche o particelle che devono spostarsi in un ambiente liquido. Il limite è che l’oggetto si comporta come una singola unità.
Il lavoro del MIT introduce una possibilità diversa: all’interno della stessa microstruttura, alcune parti possono reagire più di altre. Questo consente movimenti più complessi, come piegamenti differenziati, chiusura di piccole “dita”, attuazione locale o cambio di stato di un microsistema.
Per dimostrarlo, i ricercatori hanno realizzato strutture a forma di piccolo lecca-lecca, alte meno di un millimetro, con sfere magnetizzate in modo diverso. Quando un magnete comune viene avvicinato, le singole strutture si piegano con intensità differenti e possono chiudersi in una configurazione simile a una piccola pinza. Il risultato non va interpretato come un microrobot medico pronto all’uso, ma come una prova chiara del principio: la distribuzione magnetica può essere progettata dentro una struttura morbida stampata in 3D.
Una microvalvola magnetica come dimostrazione funzionale
Il gruppo ha realizzato anche un dispositivo bistabile, cioè capace di mantenere due posizioni stabili. La struttura comprende un piccolo rettangolo lungo circa un millimetro e quattro elementi laterali simili a palette, spessi circa otto micrometri. Applicando un magnete da un lato, le palette si muovono e portano la struttura in una posizione. Spostando il magnete dall’altro lato, il sistema cambia stato.
Questa dimostrazione è particolarmente interessante per la microfluidica. Nei dispositivi lab-on-chip, dove piccolissimi canali trasportano liquidi per analisi biologiche, chimiche o diagnostiche, servono valvole, interruttori e componenti mobili capaci di regolare il flusso. Un microinterruttore magnetico morbido potrebbe essere usato, in prospettiva, per aprire o chiudere un canale senza contatto fisico diretto e senza integrare attuatori rigidi più complessi.
Anche in questo caso bisogna mantenere prudenza. Tra una prova di laboratorio e un dispositivo industriale o biomedicale servono molte verifiche: compatibilità dei materiali, affidabilità dopo molti cicli, controllo del campo magnetico, comportamento in liquidi reali, sterilizzazione, biocompatibilità e produzione ripetibile.
Applicazioni possibili: medicina, microfluidica e materiali programmabili
Il campo più citato è quello medico. Microstrutture guidate da magneti potrebbero essere usate, in futuro, per rilasciare farmaci in una zona specifica, raccogliere piccoli campioni biologici o muoversi in ambienti dove un intervento chirurgico sarebbe troppo invasivo. L’interesse per i microrobot magnetici nasce proprio dal fatto che i campi magnetici possono essere applicati dall’esterno, senza fili e senza contatto.
Ma la medicina non è l’unico scenario. La microfluidica è un altro ambito naturale. Valvole, pinze, interruttori e microattuatori magnetici possono servire in chip di analisi, dispositivi per colture cellulari, strumenti diagnostici e sistemi per manipolare piccole quantità di liquido. In questi dispositivi, la capacità di integrare attuatori direttamente nella struttura stampata può ridurre componenti separati, assemblaggi e complessità.
C’è poi il tema dei metamateriali e dei materiali programmabili. Un materiale non viene definito solo dalla sua composizione chimica, ma anche dalla sua architettura interna. Se la struttura può cambiare forma sotto uno stimolo esterno, allora si apre lo spazio per materiali che modificano rigidità, permeabilità, forma o funzione in risposta a un comando magnetico. A scala micro, questo può portare a sensori, elementi di memoria meccanica, microattuatori e superfici dinamiche.
Il ruolo dei ricercatori e delle istituzioni
Lo studio coinvolge Rachel M. Sun, Andrew Y. Chen, Yiming Ji, Eric M. Stewart, Daryl W. Yee e Carlos M. Portela. Il lavoro è stato condotto al MIT con la collaborazione di EPFL e University of Cincinnati, e si inserisce nell’attività del gruppo Portela sui metamateriali, cioè materiali in cui le proprietà emergono dalla geometria interna oltre che dalla composizione.
La ricerca è stata supportata anche dalla National Science Foundation e dal programma seed grant di MathWorks, con parte del lavoro svolta nelle strutture MIT.nano. Questo dettaglio aiuta a capire la natura del progetto: non è una tecnologia commerciale pronta per essere installata in una linea produttiva, ma una piattaforma di ricerca che unisce materiali morbidi, microfabbricazione, chimica e robotica.
Il confronto con i metodi precedenti
La stampa 3D di microattuatori magnetici non nasce da zero. Da anni gruppi di ricerca lavorano su eliche magnetiche, micro-nuotatori, strutture caricate con nanoparticelle e microcomponenti guidati da campi magnetici. ETH Zurich, per esempio, ha già esplorato microattuatori magnetici prodotti con tecnologie di microstampa e materiali compositi. Altri lavori hanno usato resine caricate con particelle magnetiche o rivestimenti magnetici applicati dopo la fabbricazione.
La differenza principale del metodo MIT è l’integrazione tra stampa ad alta risoluzione e formazione interna delle nanoparticelle dopo la stampa. Non si tratta semplicemente di rivestire una struttura dall’esterno. Le particelle si formano nella matrice dell’idrogel, e la quantità può essere modulata localmente grazie alla diversa reticolazione generata durante la stampa.
Questa distinzione è importante perché permette di combinare geometria fine e funzionalità distribuita. Una cosa è creare un oggetto magnetico; un’altra è creare un oggetto in cui ogni regione risponde in modo diverso al campo magnetico.
Perché la stampa 3D a due fotoni è centrale
La stampa 3D a due fotoni è una delle tecnologie più adatte quando si lavora sotto il millimetro. Permette di produrre forme tridimensionali complesse con dettagli molto piccoli, perché la reazione di polimerizzazione avviene solo nel punto focalizzato dal laser. Questa capacità la rende interessante per micro-ottica, fotonica, biomedicale, micromeccanica e dispositivi microfluidici.
Nel caso dei microrobot morbidi, la geometria è fondamentale. Una piccola variazione nella forma di una leva, di una cerniera o di una paletta può cambiare la deformazione. Se poi il materiale risponde a un campo magnetico, forma e distribuzione delle nanoparticelle devono essere progettate insieme. La stampa 3D non è usata solo per miniaturizzare un oggetto, ma per programmare il modo in cui quell’oggetto si muoverà.
Le sfide ancora aperte
Il risultato è promettente sul piano scientifico, ma non va confuso con un prodotto utilizzabile in clinica. La prima domanda riguarda la scalabilità. La polimerizzazione a due fotoni è molto precisa, ma non è nota per essere un processo rapido quando servono grandi volumi o grandi quantità. Per applicazioni industriali, bisognerà capire se il metodo può essere automatizzato, ripetuto e integrato in flussi più produttivi.
La seconda domanda riguarda il controllo del movimento. Usare un magnete comune in laboratorio è una dimostrazione efficace, ma un dispositivo reale richiederebbe campi magnetici controllati con precisione, magari generati da bobine o sistemi programmabili. Per un impiego medicale, servirebbe guidare la struttura in ambienti complessi, con fluidi, tessuti, ostacoli e vincoli biologici.
La terza domanda riguarda i materiali. Gli idrogel sono adatti a molte applicazioni biomedicali e microfluidiche, ma devono essere valutati in termini di stabilità, biocompatibilità, durata, rigonfiamento, degradazione e comportamento dopo l’inserimento delle nanoparticelle. Anche l’ossido di ferro è un materiale molto studiato, ma la sua presenza in microdispositivi destinati al corpo umano richiede prove specifiche.
Infine c’è il tema della progettazione. Se una struttura contiene regioni con risposta magnetica diversa, il software dovrà aiutare i ricercatori a progettare non solo la forma, ma anche la distribuzione funzionale. In futuro, questi microdispositivi potrebbero richiedere strumenti CAD e simulatori capaci di collegare dose laser, reticolazione, assorbimento ionico, concentrazione di nanoparticelle e movimento sotto campo magnetico.
Un passo verso micromacchine più complesse
Il valore del lavoro sta nella possibilità di realizzare microstrutture morbide con funzioni magnetiche programmate localmente. È un passaggio importante perché la microrobotica non ha bisogno solo di oggetti piccoli che si spostano: ha bisogno di oggetti piccoli che possano afferrare, aprire, chiudere, cambiare stato, regolare flussi o interagire con l’ambiente.
La stampa 3D offre la geometria. La chimica del “double-dip” offre la funzionalità magnetica. La combinazione delle due cose permette di immaginare microrobot più simili a piccoli sistemi meccanici che a semplici particelle trascinate da un campo magnetico.
Per la manifattura additiva, il messaggio è chiaro: la microstampa 3D non è solo una questione di risoluzione. La nuova frontiera è stampare materiali che incorporano comportamenti programmabili. Non basta creare una forma microscopica: serve controllare come quella forma reagisce a uno stimolo esterno.
Il lavoro di MIT, EPFL e University of Cincinnati non elimina le difficoltà legate alla produzione, alla validazione o all’uso clinico. Mostra però una strada concreta per separare due fasi che finora erano spesso in conflitto: stampare con alta precisione e ottenere una forte risposta magnetica. Questo potrebbe diventare un tassello utile per dispositivi microfluidici, materiali intelligenti e microrobot morbidi controllati a distanza.