Università di Leeds: robot pieghevoli per la stampa 3D ispirati a Origami
Akeel Abtan ha recentemente presentato una tesi di dottorato, ” Progettazione e fabbricazione di elementi di origami per l’uso in una struttura di robot pieghevole “, presso l’ Università di Leeds (Institute of Design, Robotics and Optimization School of Mechanical Engineering). Sforzandosi di sviluppare robot in grado di trasformarsi in base alle esigenze di ricerca e salvataggio, Abtan ha esplorato tre diversi tipi di strutture di progettazione.
Mentre molti di noi possono pensare ai robot solo come fantastici costrutti cinematografici di film come Star Wars , o in realtà come assistenza attraverso le catene di montaggio nelle fabbriche, oggi sono utilizzati in una varietà di applicazioni molto reali: dalla medicina alla produzione; tuttavia, un’altra area specializzata in cui i robot sono estremamente utili è nelle attività di esplorazione, in particolare quelle che possono trovarsi in aree disastrate o in contesti più dettagliati come interventi chirurgici complessi.
“Alcune di queste attività hanno un accesso molto limitato e limitato. Queste attività richiedono l’utilizzo di robot con meno danni all’accesso. Ci sono due esempi di queste situazioni che sono la ricerca e il salvataggio di persone dagli edifici crollati e la chirurgia per i punti difficili del corpo “, spiega Abtan.
“L’idea di utilizzare i robot nelle attività di ricerca e salvataggio è stata proposta nel 1980, ma i robot di ricerca e salvataggio (SAR) non sono stati utilizzati praticamente fino all’attacco terroristico dell’11 settembre al World Trade Center. Questo spiacevole evento ha offerto l’opportunità di testare i robot di ricerca e salvataggio urbani (USAR) in pile di macerie reali. “
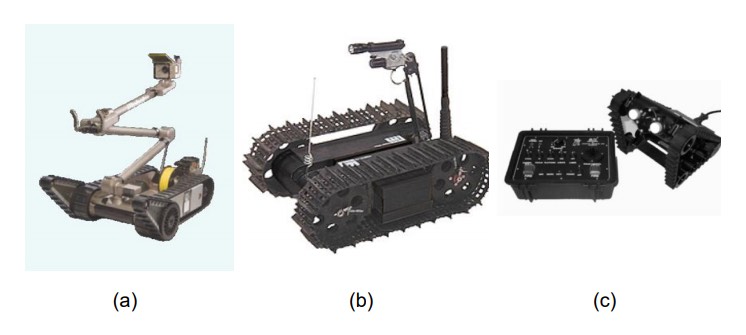
Tipi di alcuni robot di salvataggio utilizzati nel disastro del World Trade Center (a) iRobot Packbot. (b) Foster – Miller Solem. (c) Inuktun MicroVGTV
Negli ultimi anni, i ricercatori hanno progettato una vasta gamma di robot per aiutare in diverse applicazioni, tra cui:
Robot modulari
Configurazioni a quattro zampe
Robot serpente
Robot sciame
Robot minimamente invasivi
Robot pieghevoli
Strutture auto-pieghevoli
(a) Il modulo ATRON, 11 cm di diametro. A sinistra: modello CAD del modulo ATRON con coperchio in plastica. A destra: foto di un ATRON perfettamente funzionante. (b) Tre gruppi di sette moduli ATRON. Da sinistra a destra, le configurazioni sono snake, cluster-walk e car
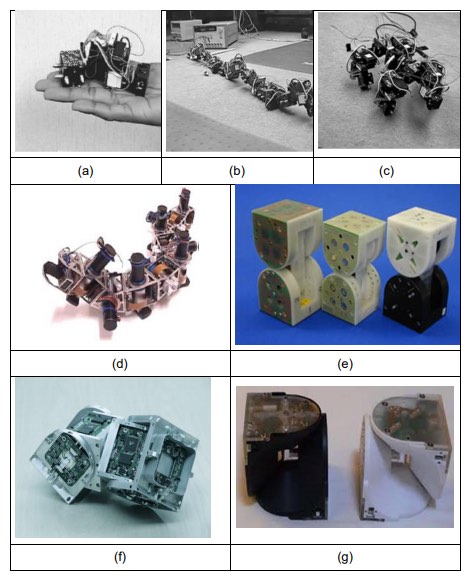
(a) Modulo Conro. (b) Robot Conro a forma di serpente. (c) Robot Conro in forma quadruplicata. (d) Nove moduli PlayBot collegati insieme in una configurazione snake. (e) M-TRAN Modulo I (a sinistra) II (al centro) III (a destra). (f) Modulo SuperBot. (g) moduli UBot. Modulo attivo (a sinistra). Modulo passivo (a destra)

Snake Robot arrampicarsi su un albero
Il robot deformabile della ruota
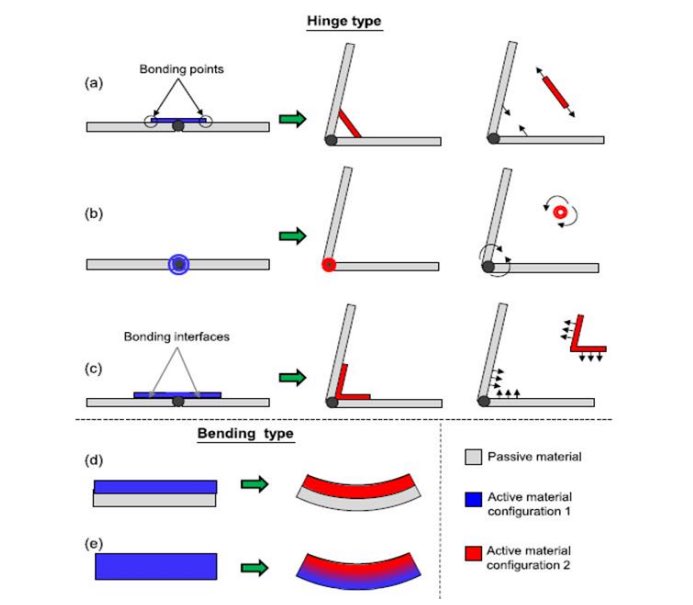
Concetti di base sulla piega attiva. Tipo di cerniera: (a) estensionale, (b) torsionale e (c) flessionale. Sono anche mostrati diagrammi individuali semplificati della struttura della faccia della cerniera e dell’elemento attivo. Tipo di piegatura: (d) doppio strato costituito da uno strato attivo e uno passivo e (e) strato singolo sottoposto a campo guida classificato
Ci sono sfide nell’uso di qualsiasi robot, tuttavia, così come lo sarebbe nell’uso delle risorse umane per affrontare tali lavori. Potrebbero esserci problemi di accesso, minaccia di crollo dell’edificio o ostacoli in delicati problemi chirurgici. Nella maggior parte dei casi, la dimensione del robot è il problema in quanto l’hardware deve essere sufficientemente piccolo da adattarsi a piccoli spazi ma deve anche essere in grado di muoversi correttamente all’interno di essi. Con questo in mente, Abtan ha raggiunto l’ispirazione per origami, integrando un design che potrebbe trasformarsi da piccolo a grande,
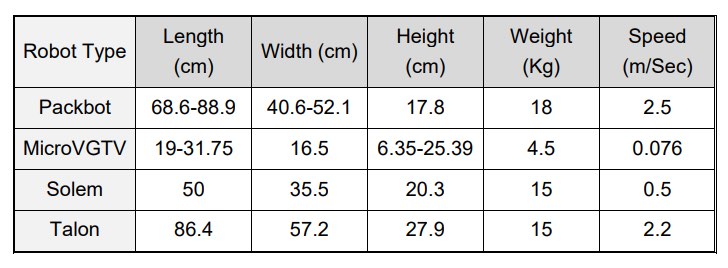
Dimensioni, peso e velocità di alcuni robot di salvataggio.
“I robot Origami sono macchine autonome, la cui forma e funzione sono create dalla piegatura. I loro corpi sono costituiti da diverse pieghe dinamiche che si comportano insieme per azionare la macchina. Il robot origami è costituito da un unico foglio planare che viene piegato in una complessa struttura 3D. I robot Origami hanno una conformità integrata a causa della geometria delle pieghe e delle pieghe del materiale, e sono semi-morbidi, cioè presentano le proprietà di entrambi i robot rigidi e morbidi “, ha spiegato Abtan.
“L’approccio origami alla realizzazione di robot può essere considerato un approccio dall’alto verso il basso. Ciò è in contrasto con il tradizionale approccio dal basso verso l’alto per la realizzazione di robot, ovvero componenti indipendenti come dadi e bulloni vengono assemblati manualmente in modo incrementale, richiedendo tempo, impegno ed esperienza. I robot Origami offrono l’opportunità di semplificare e accelerare la progettazione e la fabbricazione di robot. “
Un ovvio problema riguardante i robot origami è la necessità di sostituire la carta con materiali appropriati per le applicazioni a portata di mano.
“Fino ad ora non esiste una visione chiara sul comportamento della struttura degli origami e molti ricercatori studiano ancora vari tipi di strutture degli origami”, afferma Abtan.
Il primo passo per la creazione di un robot pieghevole è la comprensione della struttura degli origami, seguita dalla ricerca di tipi pieghevoli e descrizioni matematiche. In alcuni casi, potrebbe essere necessario analizzarne il potenziale in applicazioni di ingegneria meccanica. Abtan esplora tre strutture di origami di base: Miura, palla e torre contorta. È necessaria una ricerca dedicata per progettare le cerniere e scegliere i materiali adeguati.
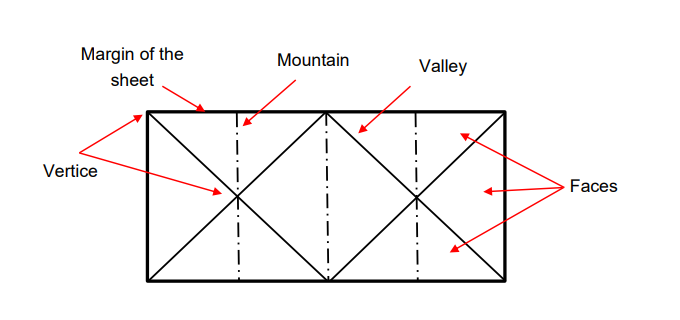
Modello di piega che illustra vari concetti di origami
Per questo studio, è stata utilizzata una stampante 3D per creare una struttura pieghevole. Abtan ha utilizzato due diversi tipi di materiale (Vero per facce solide e TangoPlus FLX930 per linee di piega morbide), quindi ha proceduto a prove di trazione, prove di flessione, prove di fatica e altro.
“I risultati mostrano che il limite di deformazione della fatica è 0,226 per un carico dinamico elevato, ma può essere aumentato a 1,6 per un carico ciclico basso”, ha affermato Abtan. “Inoltre, Tango plus FLX930 non può guastarsi a causa delle forze di trazione in questa gamma di sollecitazioni. Le proprietà meccaniche di Kapton mostrano un elevato allungamento a trazione rispetto al materiale Tango Plus. Viene calcolato il limite di fatica Kapton e i risultati mostrano che il limite di deformazione della fatica è 0,1 per un carico dinamico elevato. “
Il sistema di attuazione dipendeva dalle esigenze del robot, con due diversi tipi di strumenti di trasmissione della forza testati: la corda D75 Dyneema e la catena stampata in 3D. Dopo aver ottenuto tre diversi risultati sulla misurazione del carico di rottura della catena stampata in 3D, Abtan ha notato che un sistema di attuazione incorporato con materiali intelligenti era “adatto” per una struttura auto-pieghevole usando filo SMA.
“Il passo successivo è stato quello di combinare la struttura OSM con il sistema di attuazione esterno al fine di costruire un robot OSM (struttura Origami per robot di manipolazione). La fusione della struttura stampata in 3D, (che ha le cerniere stampate utilizzando materiale Tango plus), con attuatori SMW per fornire una struttura auto-pieghevole è stato un altro passo verso la realizzazione di strutture auto-pieghevoli “, ha affermato Abtan.
Con tre metodi disponibili per realizzare strutture auto-pieghevoli, i ricercatori hanno scelto tutti e tre, dal taglio manuale dei materiali all’utilizzo di un laser cutter, alla stampa 3D, fabbricando la piega con due materiali contemporaneamente. Il primo tentativo fallì, con crepe sui bordi e spazi ai bordi. Per risolvere il problema, i ricercatori hanno creato un nuovo campione della cella unitaria con 0,5 mm di sovrapposizione del materiale Tango Plus sui bordi.
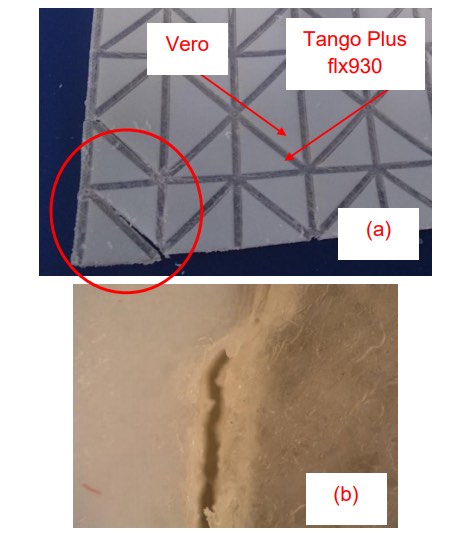
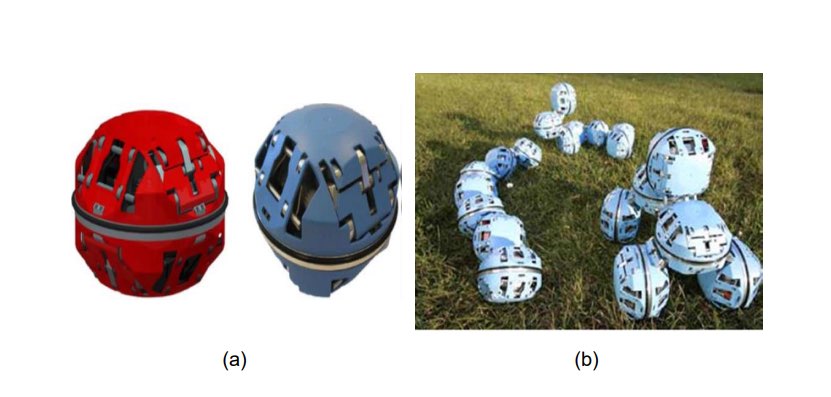
(a) Motivo a sfera origami stampato utilizzando una stampante 3D con
tecnica multi-materiali . (b) Lacune al confine tra materiale solido e morbido.
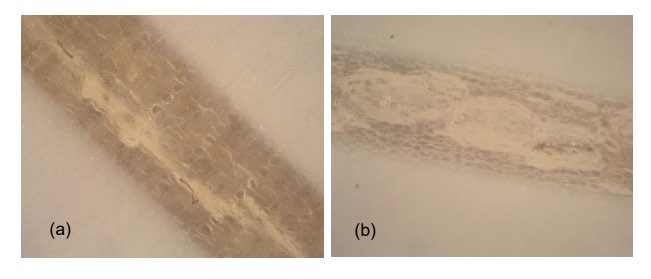
Foto microscopiche della cerniera stampate con materiale Tango Plus flx930. (a) Lacune al confine tra materiale solido e morbido. (b) Le crepe sulla superficie del materiale morbido.
“Un cubo auto-pieghevole è stato fabbricato usando questo approccio di stampa 3D. Il cubo è stato attivato utilizzando cinque attuatori BSW con attivazione del riscaldamento uniforme. Il cubo esegue un processo di piegatura stabile entro 19 secondi “, ha detto Abtan.
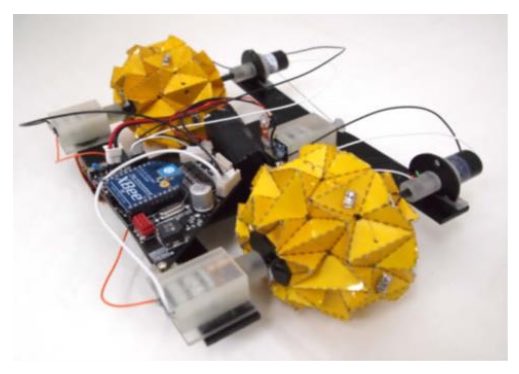
L’OSM-Bot è stato realizzato utilizzando carte di carta e un attuatore esterno con quattro servi e corda Sk75 Dyneema utilizzata per la trasmissione della forza.
“Il robot OSM mostra la capacità di essere manipolato usando la contrazione e il movimento di flessione in quattro direzioni”, ha concluso Abtan. “Sono stati studiati altri due modi per fabbricare l’OSM-Bot: l’acrilico-Kapton con approccio al taglio laser e l’approccio alla stampa 3D. I due metodi non riescono a costruire una struttura OSM-Bot stabile che potrebbe operare come la struttura origami di carta per carte. ”