I RICERCATORI STAMPANO IN 3D SCIAMI DI ROBOT A PIÙ GAMBE IN GRADO DI SUPERARE COLLETTIVAMENTE GLI OSTACOLI
I ricercatori dell’Università di Notre Dame hanno stampato in 3D con successo sciami di robot a quattro zampe in grado di attraversare terreni complessi e superare gli ostacoli sul loro cammino.
Yasemin Ozkan-Aydin, ingegnere robotico e assistente professore di ingegneria elettrica all’università, ha cercato di imitare all’interno dei robot i comportamenti collettivi di formiche, api e uccelli per risolvere i problemi.
Lo studio ha esplorato come la creazione di una connessione fisica tra i singoli robot potrebbe migliorare la mobilità e le capacità di un sistema collettivo con gambe terrestri. Ad esempio, se un robot incontra un ostacolo che non è in grado di superare, gli altri si uniscono per risolvere collettivamente il problema.
“I robot con le gambe possono navigare in ambienti difficili come terreni accidentati e spazi ristretti e l’uso degli arti offre un supporto efficace del corpo, consente una rapida manovrabilità e facilita l’attraversamento degli ostacoli”, ha affermato. “Tuttavia, i robot con le gambe affrontano sfide di mobilità uniche negli ambienti terrestri, il che si traduce in una riduzione delle prestazioni locomotorie”.
Attualmente, sciami di robot a terra sono limitati ad ambienti relativamente semplici, che secondo Ozkan-Aydin sono in parte dovuti alla mancanza di capacità locomotorie per affrontare terreni difficili. Pertanto, all’inizio del 2020 ha iniziato a condurre ricerche ed esperimenti per replicare il comportamento auto-organizzato delle colonie e dei greggi di animali per migliorare le capacità dei robot dello sciame.
Lo studio di Ozkan-Aydin si basa sulla premessa che una connessione fisica tra i singoli robot potrebbe migliorare la mobilità e le capacità di un intero sistema. In sostanza, se un compito particolare fosse al di là delle capacità di un singolo robot, come trasportare un oggetto, i robot si connetterebbero fisicamente l’uno all’altro per formare un sistema a più gambe più grande per sostenere collettivamente il peso.
“Quando le formiche raccolgono o trasportano oggetti, se si incontra un ostacolo, il gruppo lavora collettivamente per superare quell’ostacolo”, ha spiegato Ozkan-Aydin. “Se c’è un vuoto nel percorso, ad esempio, formeranno un ponte in modo che le altre formiche possano attraversarlo – e questa è l’ispirazione per lo studio.
“ATTRAVERSO LA ROBOTICA, SIAMO IN GRADO DI ACQUISIRE UNA MIGLIORE COMPRENSIONE DELLE DINAMICHE E DEI COMPORTAMENTI COLLETTIVI DI QUESTI SISTEMI BIOLOGICI ED ESPLORARE COME POTREMMO ESSERE IN GRADO DI UTILIZZARE QUESTO TIPO DI TECNOLOGIA IN FUTURO”.
Per creare il suo sciame, Ozkan-Aydin ha utilizzato una stampante 3D per produrre robot a quattro zampe a basso costo di lunghezza compresa tra 15 e 20 cm. Ogni robot era dotato di una batteria ai polimeri di litio, un microcontrollore e tre sensori. Oltre a un sensore di luce nella parte anteriore, ogni robot presentava due sensori tattili magnetici nella parte anteriore e posteriore per consentire loro di attaccarsi agli altri nello sciame.
Ogni robot è stato stampato in 3D con quattro gambe flessibili, che secondo Ozkan-Aydin hanno dato ai robot un livello di “intelligenza meccanica” e hanno ridotto la necessità di sensori aggiuntivi.
“Non sono necessari sensori aggiuntivi per rilevare gli ostacoli perché la flessibilità delle gambe aiuta il robot a superarli”, ha affermato. “Possono testare le lacune in un percorso, costruendo un ponte con i loro corpi; spostare gli oggetti individualmente; o connettersi per spostare oggetti collettivamente in diversi tipi di ambienti.
Testare lo sciame
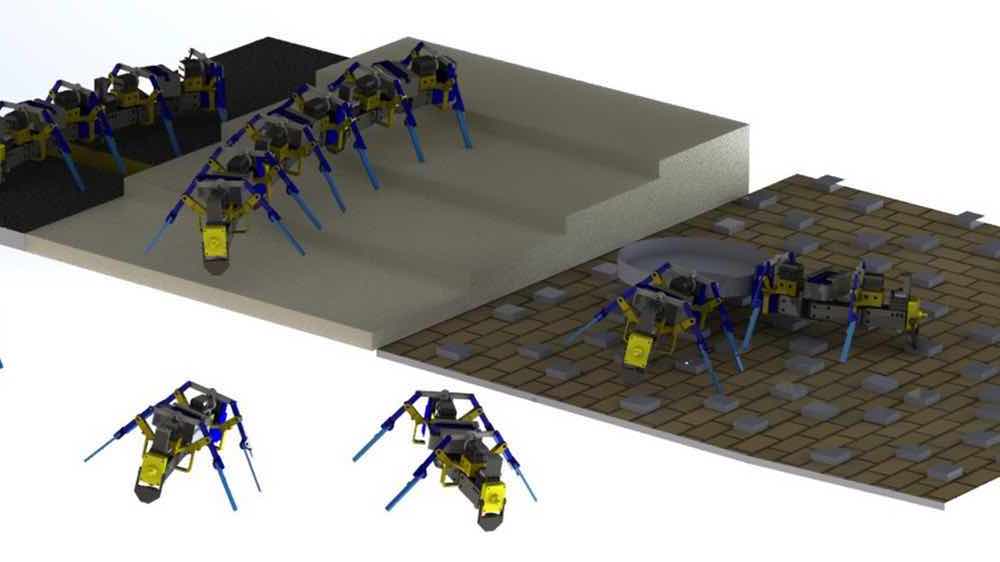
Dopo aver stampato in 3D ogni robot, Ozkan-Aydin ha testato le capacità dei robot su terreni come erba, pacciame e moquette a pelo lungo e nel superare ostacoli come foglie e ghiande. Ha testato i robot su un terreno pianeggiante su un pannello truciolare e ha anche costruito scale utilizzando schiuma isolante e blocchi di legno per fungere da terreno accidentato.
Quando un singolo robot rimaneva bloccato su un ostacolo, veniva inviato un segnale ad altri robot nello sciame. Quindi si sono collegati tra loro tramite i loro sensori tattili magnetici per fornire supporto e superare con successo l’ostacolo o il terreno in questione.
Mentre Ozkan-Aydin ammette che ci sono ancora miglioramenti da apportare al suo design dello sciame di robot, crede che lo studio aiuterà a informare il design di sciami a basso costo che possono adattarsi a scenari imprevisti. Prevede che la sua ricerca aiuti lo sviluppo di robot sciami in grado di svolgere compiti del mondo reale come operazioni di ricerca e salvataggio, trasporto di oggetti, monitoraggio ambientale e persino esplorazione dello spazio.
In futuro, Ozkay-Aydin concentrerà la sua ricerca sul miglioramento delle capacità di controllo, rilevamento e potenza del sistema robotico dello sciame esplorando ulteriormente le dinamiche collettive di insetti come formiche e termiti. Oltre a migliorare la tecnologia delle batterie all’interno dei robot, il lavoro futuro cercherà di incorporare più sensori e motori più potenti, pur mantenendo le loro dimensioni ridotte.
“Per i sistemi a sciame funzionali, la tecnologia delle batterie deve essere migliorata”, ha affermato. “Abbiamo bisogno di piccole batterie in grado di fornire più energia, idealmente della durata di più di 10 ore. Altrimenti, l’utilizzo di questo tipo di sistema nel mondo reale non è sostenibile. Devi pensare a come funzionerebbero i robot nel mondo reale, quindi devi pensare a quanta energia è richiesta, alla dimensione della batteria che usi.
“TUTTO È LIMITATO, QUINDI È NECESSARIO PRENDERE DECISIONI CON OGNI PARTE DELLA MACCHINA.”
Ulteriori informazioni sullo studio possono essere trovate nel documento intitolato: “Gli sciami di robot multileggeri auto-riconfigurabili realizzano collettivamente compiti terradinamici impegnativi”, pubblicato sulla rivista Science Robotics. Lo studio è co-autore di Y. Ozkan-Aydin e D. Goldman.