Le dita cellulari stampate in 3D offrono l’equilibrio materiale necessario per la robotica moderna
In ‘ Toward a Smart Compliant Robotic Gripper Equipped with 3D-Designed Cellular Fingers,’ ,’ gli autori Manpreet Kaur e Woo Soo Kim approfondire il mondo di combinare la stampa 3D e la robotica. Il loro articolo pubblicato di recente si concentra sulla progettazione di una struttura robotica con strutture cellulari deformabili e facili da fabbricare.
Il robot metallico convenzionale oi componenti robotici vengono sempre più messi in scena da materiali più morbidi che offrono maggiore versatilità per applicazioni industriali. Non solo, molti di questi nuovi materiali sono in grado di adattarsi al loro ambiente, influenzato da ambienti come la temperatura o l’umidità. Kaur e Kim ci ricordano che molte di queste innovazioni sono originariamente ispirate dalla natura, come il movimento e le proprietà di attrito del serpente.
Nel creare la robotica leggera, tuttavia, c’è la sfida di trovare un equilibrio tra flessibilità e rigidità strutturale e incorporare l’elettronica che di solito consiste in una varietà di diversi sistemi ingombranti. Il dito cellulare osservato in questa ricerca può essere realizzato con sensori incorporati nella punta delle dita, consentendo una forza di presa significativa di 16N e la capacità di raccogliere numerosi oggetti, e fungendo da esempio di architetture più complesse per una migliore funzionalità e prestazioni complessive .
“I solidi cellulari a stiramento dominato, come ottetto, ottaedro e così via, mostrano una resistenza allo snervamento iniziale maggiore rispetto ai materiali schiumati dominati dalla flessione, che è dovuto alla loro diversa disposizione dei componenti strutturali e li rende migliori alternative per applicazioni strutturali leggere. Una struttura così spazialmente unica produce un rapporto di Poisson (NPR) negativo; questi sono chiamati ausiliari. Come altri tipi di metamateriali meccanici, l’NPR degli ausiliari è generalmente una conseguenza diretta della topologia, in cui le articolazioni ruotano per spostare la struttura ”, affermano i ricercatori.
I materiali NPR sono anche in grado di deformare e mostrare “comportamento conforme alla flessione”. In questo progetto di ricerca, Kaur e Kim hanno usato strutture a nido d’ape – ancora una volta, ispirate dalla natura – esaminando la loro capacità di assorbire energia e piegarsi. Queste strutture rientranti vengono tradotte più facilmente nel regno 3D e hanno permesso agli autori di sperimentare i parametri e le proprietà delle celle risultanti. L’obiettivo finale era quello di raggiungere la deformità, insieme a un’adeguata durabilità ed efficienza energetica.
Con l’uso di materiali cellulari porosi intesi a soddisfare l’equilibrio tra morbidezza e flessibilità e anche la necessità di fermezza, i ricercatori sono stati in grado di riunire le loro conoscenze su materiali, produzione e robotica in uno — insieme alla stampa 3D e all’uso di materiali tripli. Il dito della pinza robotizzata era costituito dalle seguenti parti leggere:
Tre segmenti di ottetti
Due articolazioni auxetiche (imitando le ossa e le articolazioni umane)
Sensore di pressione integrato sulla punta delle dita
I seguenti materiali sono stati utilizzati per la stampa 3D dei modelli singolo, doppio 1 e doppio 2: SemiFlex, PLA e PLA rinforzato con fibra di carbonio (CFRPLA). Il livello di porosità ha permesso l’equilibrio ricercato in una struttura leggera oltre a offrire la rigidità adeguata per varie funzioni di presa. Il design generale era anche responsabile del sistema di dita in grado di deformarsi secondo necessità, in sintonia con gli oggetti e le loro forme specifiche, mentre i sensori a punta di dito monitoravano l’ambiente.
Proprietà meccaniche dei campioni dal test di compressione
“Il nostro dito robotizzato progettato è un punto di partenza del concetto di design cellulare. Pertanto, c’è molto spazio per ulteriori ricerche su questo argomento. La progettazione di altri metamateriali meccanici ha molte opportunità, quindi altre strutture reticolari possono essere studiate per ottimizzare ulteriori funzionalità di deformazione meccanica nel dito robotico ”, hanno concluso i ricercatori.
“L’ottimizzazione della progettazione dei sensori e l’aggiunta di altri sensori possono anche essere studiate per ottenere le sue prestazioni onnipresenti. Questo design robotico conforme con il corpo metamateriale può dimostrare di migliorare la funzionalità e la durata dei corpi robotici per applicazioni protesiche o industriali, sviluppando così una nuova generazione di sistemi robotici con prestazioni migliori e maggiore adattabilità in una varietà di compiti. “
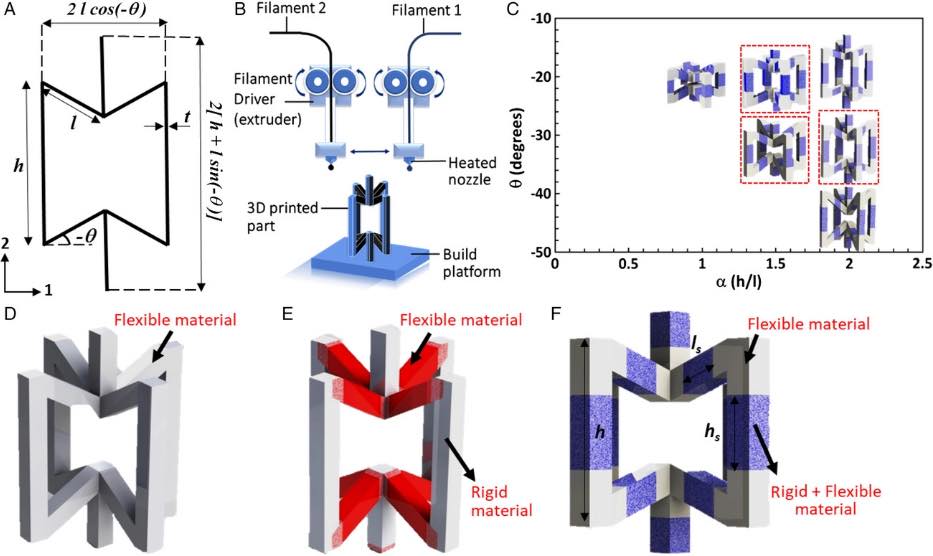
Progettazione e realizzazione di una struttura auxetica multi-materiale: A) Schizzo 2D della cellula unitaria a nido d’ape rientrante con parametri definiti.
B) Dimostrazione schematica della stampa 3D multi-materiale basata su estrusione di filamenti.
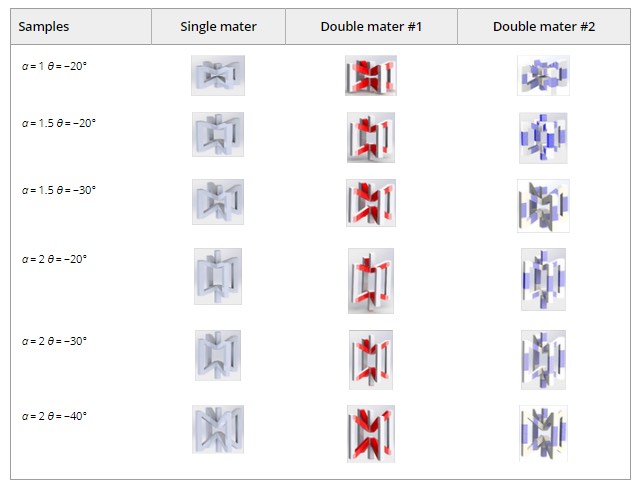
C) Disegni diversi di celle di unità auxetiche con due parametri importanti, α (il rapporto della lunghezza del montante verticale h con il montante rientrante l) e θ (l’angolo rientrante), definito nello schizzo (A).
D) L’immagine CAD della struttura a nido d’ape rientrante 3D realizzata unendo due strutture 2D a 90 °.
Il colore grigio a tono singolo indica l’uso di un singolo materiale che è un materiale flessibile basato su TPU.
E) Una cellula unitaria ausiliaria a doppio materiale in cui i montanti rientranti (rosso) in materiale flessibile e i montanti verticali (grigio) in materiale rigido.
F) Diversi modelli di cella di unità ausiliaria a doppio materiale,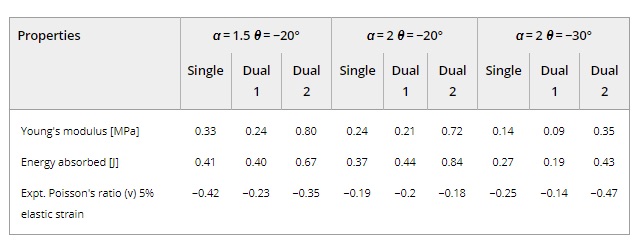
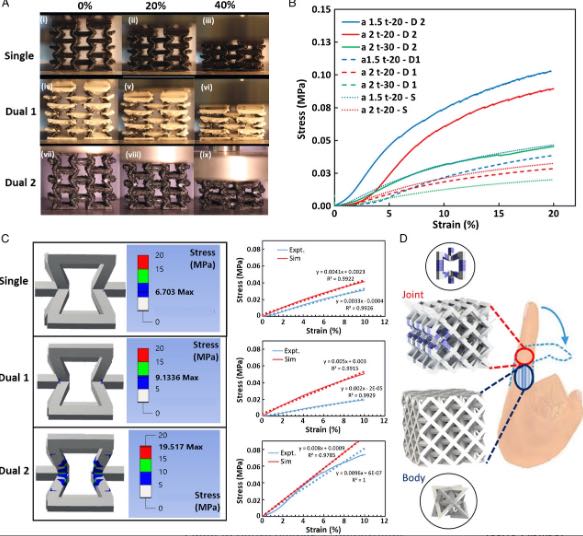
Caratterizzazione di strutture auxetiche stampate in 3D: A) Campioni compressi dal disegno con α = 1,5 e θ = −20 °. Sono state studiate tre diverse distribuzioni di materiale nella cella unitaria (design singolo, doppio 1 e doppio 2). Le immagini sono state catturate per ogni campione con deformazioni dello 0%, 20% e 40%. B) Grafico stress-deformazione di tre campioni con diverse combinazioni di α = 1,5, 2 e θ = −20 °, −30 ° per i disegni (singolo, doppio 1 e doppio 2). Le leggende si leggono come “a” per alpha, “t” per theta e S, D1, D2 per single, dual 1 e dual 2, rispettivamente. C) Analisi di simulazione ad elementi finiti (FEA) di cellule di unità auxetiche compresse per studiare le diverse distribuzioni di sollecitazioni nella regione elastica per i tre diversi design. Il codice colore viene mantenuto costante ed è definito accanto a ciascuna immagine. Le curve elastiche corrispondenti dell’esperimento e della simulazione vengono confrontate per ciascun caso. D) Il dito cellulare è progettato utilizzando la rigida struttura dell’ottetto dominata da allungamento per il corpo principale e utilizzando la struttura auxetica scelta (α = 1,5 e θ = −20 °) con due design doppi per le articolazioni.