Integrazione di celle solari organiche ultramorbide montate sul corpo su insetti cyborg con mobilità intatta
Gli insetti cyborg sono stati proposti per applicazioni come la ricerca e il salvataggio urbano. I dispositivi di raccolta dell’energia montati sul corpo sono fondamentali per espandere la gamma di attività e funzionalità degli insetti cyborg. Tuttavia, le loro uscite di potenza sono limitate a meno di 1 mW, che è considerevolmente inferiore a quelle richieste per il controllo wireless della locomozione. L’area e il carico del dispositivo di raccolta dell’energia compromettono notevolmente la mobilità dei minuscoli robot. Qui, descriviamo l’integrazione di un modulo di celle solari organiche ultramorbide su insetti cyborg che preserva le loro capacità di movimento. La nostra strategia di progettazione del sistema quantificato, sviluppata utilizzando una combinazione di elettronica a pellicola ultrasottile e una struttura intercalare adesivo-non adesiva per eseguire il movimento di base degli insetti, ha raggiunto con successo la locomozione fondamentale dell’attraversamento e dell’autoraddrizzamento. Il modulo a celle solari organiche ultrasottili montato sul corpo raggiunge una potenza di 17,2 mW. Dimostriamo la sua fattibilità visualizzando il controllo della locomozione wireless di ricarica degli insetti cyborg.
introduzione
I cyborg, che sono integrazioni di macchine e organismi, possono essere utilizzati non solo per sostituire parti del corpo difettose di un organismo, ma anche per realizzare funzioni che superano le normali capacità dell’organismo 1 . I progressi nell’elettronica hanno portato alla crescente integrazione di organismi e macchine. La miniaturizzazione e la fabbricazione di chip semiconduttori a basso consumo energetico attraverso la micro/nanofabbricazione hanno prodotto cyborg di piccoli organismi. In particolare, gli insetti cyborg con piccoli circuiti integrati per controllarne il comportamento sono stati proposti per applicazioni quali la ricerca e il salvataggio urbano, il monitoraggio ambientale e l’ispezione di aree pericolose 2 , 3 , 4 , 5 , 6 ,7 . L’integrazione di componenti elettronici sottili e morbidi negli organismi può migliorarne la facilità d’uso in numerose applicazioni 8 , 9 , 10 , 11 . L’elettronica estensibile consente l’integrazione di dispositivi su superfici curve tridimensionali con giunti mobili 12 , 13 .
L’evoluzione dell’elettronica integrabile con gli organismi ha aumentato la domanda per lo sviluppo di dispositivi di alimentazione con densità di potenza più elevate. I limiti di volume e peso delle batterie per i robot non collegati possono essere superati utilizzando strategie di ricarica come il ritorno dei robot nei punti di ricarica designati prima che le batterie si esauriscano 14 e l’alimentazione delle batterie in modalità wireless 15 , 16 . Un dispositivo per la raccolta di energia montato su un robot può ampliare la sua gamma di attività 17 , 18 . Una cella a biocombustibile che genera energia dal corpo di un insetto è un promettente dispositivo per la raccolta di energia 19. Ad oggi, 333 μW è la potenza di uscita più alta raggiunta con le celle a biocombustibile enzimatiche. La carica della batteria e la guida del circuito sono state ottenute per questa potenza erogata per gli scarafaggi ambulanti 20 , 21 .
Funzioni avanzate, come il controllo wireless della locomozione degli insetti cyborg, richiedono dispositivi per la raccolta di energia in grado di generare diversi milliwatt o più. Una cella solare può generare una potenza di 10 mW cm –2 o superiore in condizioni di luce solare esterna; questa tecnologia può generare la massima potenza disponibile in condizioni esterne 22 . Una cella solare in silicio rigido montata su un insetto immobile viene utilizzata per caricare le batterie ai polimeri di litio 23 , 24 . Celle solari emergenti, comprese celle organiche 25 , perovskite 26 e quantum dot 27, possono raggiungere un’elevata potenza per peso grazie al loro substrato ridotto e agli spessori di passivazione, il che è vantaggioso per ottenere l’integrazione nei piccoli insetti viventi. Le celle solari organiche ultrasottili con uno spessore totale inferiore a 5 μm possono raggiungere un’efficienza di conversione di potenza (PCE) del 15,8% risultando in una potenza per peso di 33,8 W g –1 28 .
Tuttavia, il raggiungimento di una potenza di 10 mW o superiore utilizzando raccoglitori di energia montati su insetti mobili viventi per il controllo wireless della locomozione rimane impegnativo. Per integrare i dispositivi in piccoli animali con superfici limitate e trasportare carichi 29 , è necessaria la progettazione del dispositivo e la strategia di integrazione di celle solari di grandi dimensioni per ottenere una potenza sufficiente e mantenere contemporaneamente le capacità comportamentali di base degli insetti. Poiché la potenza di uscita della cella solare è proporzionale all’area, sia il carico del dispositivo che il contatto tra il dispositivo e le articolazioni in movimento compromettono notevolmente le capacità di movimento.
In questo articolo, riportiamo un insetto cyborg ricaricabile che utilizza un modulo di celle solari organiche ultramorbide montato che non compromette le capacità di movimento di base dell’insetto e dimostra la ricarica del controllo della locomozione wireless con tutti i componenti integrati negli insetti. Una combinazione di elettronica a pellicola ultrasottile e una struttura intercalare adesivo-non adesivo sull’addome dell’insetto ha mostrato una percentuale di successo superiore all’80% nei tentativi di autoraddrizzamento. L’effetto dell’attacco della pellicola sul movimento di base è stato quantificato utilizzando un modello di carico di punta approssimato. Un modulo a celle solari organiche ultrasottili ha raggiunto una potenza di 17,2 mW sull’addome curvo dell’insetto, che ha caricato una batteria ai polimeri di litio per azionare il modulo di controllo della locomozione wireless.
continua in inglese su https://www.nature.com/articles/s41528-022-00207-2
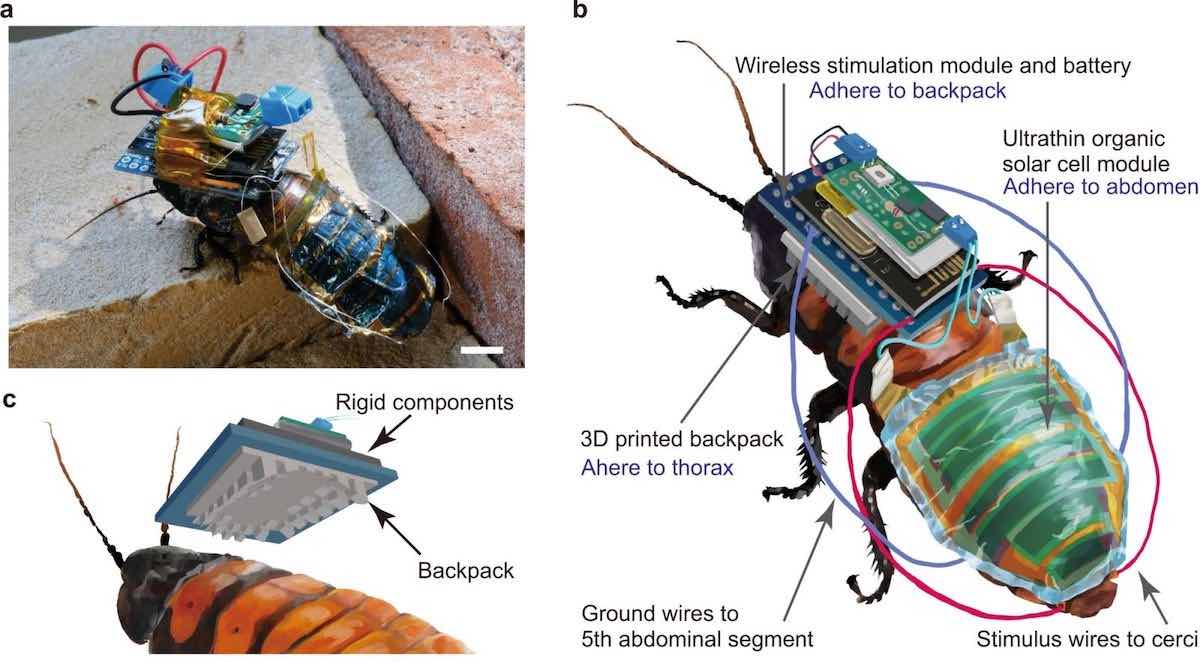
Immagine tramite CEMS di RIKEN