HARVARD E CALTECH 3D STAMPANO ROBOT MORBIDI RIPIEGABILI ISPIRATI AGLI ORIGAMI
I ricercatori dell’Università di Harvard e del California Institute of Technology hanno sviluppato sistemi robotici ispirati agli origami che adottano configurazioni specifiche per attività su richiesta.
Dei sistemi fabbricati è un “Rollbot” stampato in 3D che si assembla in un prisma pentagonale e si auto-rotola in risposte programmate a stimoli termici. Un altro dispositivo stampato in 3D è un poliedro origami auto-torcente che presenta tre configurazioni stabili. I robot morbidi incorporano cerniere attive che collegano le piastrelle polimeriche.
Secondo lo studio pubblicato su Science Robotics , tali dispositivi potrebbero spianare la strada a robot soft controllati passivamente e completamente liberi utilizzati in medicina e ingegneria industriale. Connor McMahan, co-primo autore dell’articolo, ha spiegato:
“Molti robot soft esistenti richiedono un legame con i sistemi di alimentazione e controllo esterni o sono limitati dalla quantità di forza che possono esercitare. Queste cerniere attive sono utili perché consentono ai robot morbidi di operare in ambienti in cui i cavi sono poco pratici e di sollevare oggetti molte volte più pesanti delle cerniere. ”
Realizzati con materiali altamente flessibili, i robot morbidi sono in grado di movimenti naturali simili agli organismi viventi . Tali materiali si basano su alimentazione e controllo esterni, mantenendoli vincolati a sistemi off-board o armati con componenti duri. I ricercatori si sono rivolti agli origami per creare robot soft multifunzionali poiché le pieghe sequenziali possono codificare più forme e funzionalità in una singola struttura.
Per colpire piccole regioni delle strutture robotiche che avrebbero reagito ai cambiamenti, sono stati integrati materiali attivi all’interno di oggetti stampati in 3D, inclusi elastomeri a cristalli liquidi (LCE). LCE mostra una risposta di flessione ampia e reversibile quando esposto al calore. Con questo materiale sono stati stampati in 3D due tipi di cerniere morbide che si piegano a diverse temperature di attuazione.
Se riscaldati al di sopra delle rispettive temperature, le cerniere LCE stampate in 3D cambiano forma di gradi corrispondenti. Variando la loro chimica e architettura stampata, la risposta di attuazione delle cerniere può essere programmata per piegare in un ordine specifico. Arda Kotikian, un’altra co-prima autrice dell’articolo, ha spiegato:
“CON IL NOSTRO METODO DI STAMPA 3D DELLE CERNIERE ATTIVE, ABBIAMO LA PIENA PROGRAMMABILITÀ SULLA RISPOSTA DELLA TEMPERATURA, LA QUANTITÀ DI COPPIA CHE LE CERNIERE POSSONO ESERCITARE, IL LORO ANGOLO DI PIEGA E L’ORIENTAMENTO DELLA PIEGA. IL NOSTRO METODO DI FABBRICAZIONE FACILITA L’INTEGRAZIONE DI QUESTI COMPONENTI ATTIVI CON ALTRI MATERIALI. ”
Rollbot a rotazione automatica e a rotazione automatica
Integrando le cerniere nel design, il team ha realizzato diversi dispositivi software utilizzando un approccio di produzione additiva. Il Rollbot inizia come un foglio piatto di 8 cm x 4 cm e si piega su una superficie calda di circa 200 ° C in una ruota pentagonale. Incastonato su ciascuno dei cinque lati della ruota c’è un’altra serie di cerniere. Quando viene a contatto con la superficie calda, la cerniera si piega e spinge la ruota a girare verso il lato successivo, dove si piega la cerniera successiva. Mentre rotolano via dalla superficie calda, le cerniere si aprono e sono pronte per il ciclo successivo.
Un altro dispositivo ideato dal team è un poliedro origami a rotazione automatica con tre configurazioni stabili. Se posizionato in un ambiente caldo, il robot può piegarsi in una forma piegata compatta simile a una graffetta e aprirsi quando raffreddato. Queste strutture non legate possono essere controllate passivamente. In altre parole, semplicemente esponendo le strutture a specifici ambienti di temperatura, i robot risponderanno in base alla programmazione delle cerniere.
Mentre questa ricerca si concentrava solo su stimoli termici, gli elastomeri a cristalli liquidi possono anche essere programmati per rispondere a luce, pH, umidità e altri stimoli esterni. Chiara Daraio, co-conduttrice dello studio, ha aggiunto:
“QUESTO LAVORO DIMOSTRA COME LA COMBINAZIONE DI POLIMERI REATTIVI IN UN COMPOSITO PROGETTATO PUÒ PORTARE A MATERIALI CON AUTO-ATTUAZIONE IN RISPOSTA A DIVERSI STIMOLI. IN FUTURO, TALI MATERIALI POSSONO ESSERE PROGRAMMATI PER ESEGUIRE ATTIVITÀ SEMPRE PIÙ COMPLESSE, SFOCANDO I CONFINI TRA MATERIALI E ROBOT. ”
“La materia robotica non legata con controllo passivo del morphing della forma e propulsione ” è co-autore di Arda Kotikian, Connor Mcmahan, Emily C. Davidson, Jalilah M. Muhammad, Robert D. Weeks, Chiara Daraio e Jennifer A. Lewis.
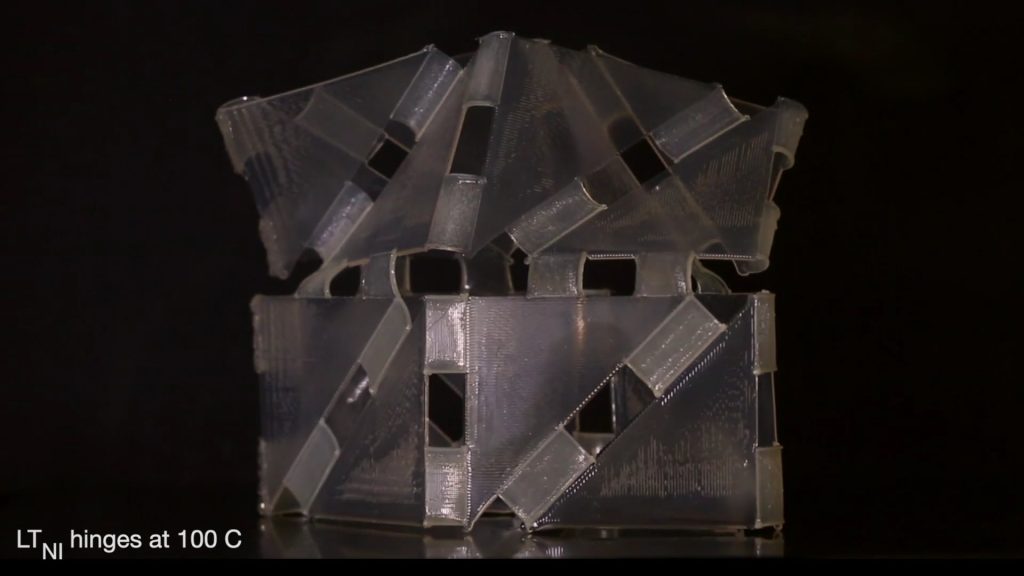
Il robot morbido stampato in 3D mostra una piegatura sequenziale quando la temperatura aumenta dalla temperatura ambiente a 100 ° C, dove si attivano le cerniere superiori, a 150 ° C dove le cerniere inferiori si attivano.