GLI SCIENZIATI STAMPANO IN 3D UN NUOVO ATTUATORE MORBIDO COME BASE PER IL ROBOT ISPIRATO ALLE MEDUSE
I ricercatori della giapponese Yamagata University hanno sviluppato un attuatore completamente stampato in 3D che potrebbe costituire la base di un robot morbido simile a una medusa.
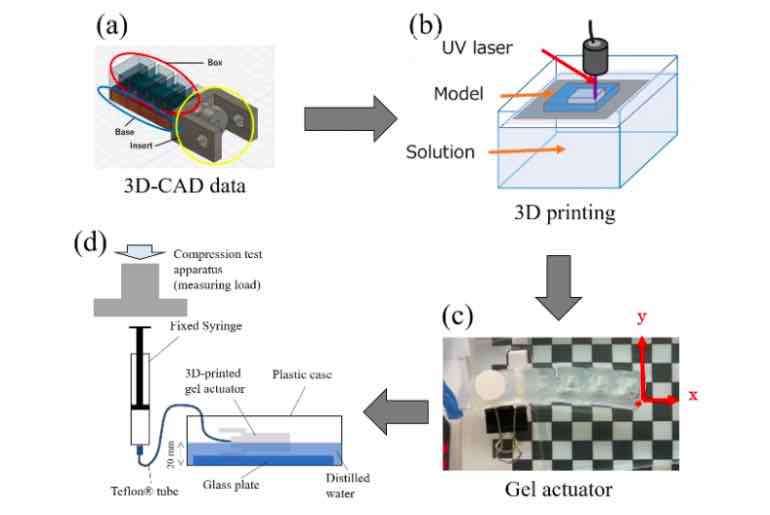
Utilizzando una stampante 3D basata su UV, il team è stato in grado di curare un idrogel Particle Double Network (P-DN) di nuova sintesi, in un meccanismo che si contrae in modo simile ai muscoli di una medusa lunare. Basandosi sul loro nuovo dispositivo, gli scienziati ora intendono creare un intero robot acquatico, con potenziali applicazioni di monitoraggio della fauna marina.
I vantaggi dello sviluppo di robot morbidi in grado di imitare i comportamenti delle loro controparti organiche si sommano a qualcosa di più del semplice valore di novità. I dispositivi avanzati hanno il potenziale per essere in grado di lavorare a fianco degli esseri umani, andando in luoghi che non possiamo, nell’ambito della gestione dei disastri, della conservazione degli oceani o persino delle applicazioni sanitarie.
Questi robot sono particolarmente promettenti sott’acqua, dove possono raccogliere ulteriori informazioni sull’oceano e contribuire a promuovere gli obiettivi di sviluppo sostenibile (SDG) delle Nazioni Unite. Uno dei modi migliori per raggiungere questo obiettivo è creare materiali morbidi che imitino la locomozione della fauna naturale, ma finora anche i robot ispirati ai polpi stampati in 3D hanno avuto corpi metallici, rendendoli potenzialmente dannosi per la vita marina.
Mentre molti robot esistenti sono alimentati da “gambe” fatte di elastomeri di silicone, gli idrogel offrono un’alternativa meno invadente, poiché sono già composti per circa il 90% di acqua. Questa composizione è anche simile a quella vista naturalmente nelle meduse, che richiedono molta meno energia per manovrare rispetto ad altre creature acquatiche, rendendole potenzialmente una base ideale per un robot di monitoraggio amico dell’ambiente marino.
Prima che il team di Yamagata iniziasse a stampare in 3D il proprio attuatore, ha sintetizzato un nuovo idrogel P-DN reticolato, composto da un primo polimero duro e fragile e da un secondo strato più morbido. Il materiale era caratterizzato da un elevato rapporto di contenuto d’acqua, una maggiore resistenza e un’eccellente stampabilità, formando una base solida ma duttile per il loro dispositivo.
Una volta che la formulazione era pronta, gli scienziati hanno utilizzato una stampante 3D basata su UV per polimerizzarla in tre parti separate: un connettore, una base e una scatola. Teoricamente, la “base” e la “scatola” sono progettate per essere deformate tramite l’iniezione di aria, creando le contrazioni necessarie per fornire la propulsione, mentre il “connettore” si limita a fissare un tubo di silicone al corpo dell’attuatore.
A scopo di test, il team ha stampato in 3D cinque diversi prototipi e ha scoperto che l’elasticità del gel era fortemente legata al tipo di monomero utilizzato e al livello di reticolazione raggiunto. Allo stesso modo, gli attuatori sono stati prodotti con larghezze dello strato di 0,4-0,5 mm, poiché gli strati più spessi mostravano un rigonfiamento che causava incongruenze attraverso la parte.
Durante i test di compressione, in cui l’aria veniva iniettata nell’attuatore tramite tubi, gli scienziati hanno scoperto di essere in grado di controllarne le deformazioni regolando il modulo elastico delle sue parti costituenti. Il dispositivo ha anche dimostrato lo stesso rapporto di contrazione di quello della medusa lunare oblata, rendendolo potenzialmente una base ideale per una replica robotica completa.
In futuro, i ricercatori ritengono che perfezionare la relazione tra lo spessore della parete dell’attuatore e la sua traiettoria sarà la chiave per sviluppare iterazioni del dispositivo migliorate. Per ora, tuttavia, il team di Yamagata intende integrare i propri attuatori in un nuovo robot ispirato alle meduse, con l’obiettivo finale di utilizzarlo all’interno di applicazioni di conservazione marina.