Il mimetismo funzionale dei recettori Ruffini con reticoli di Bragg in fibra e reti neurali profonde consente una pelle sensibile al tatto di ampia area bio-ispirata
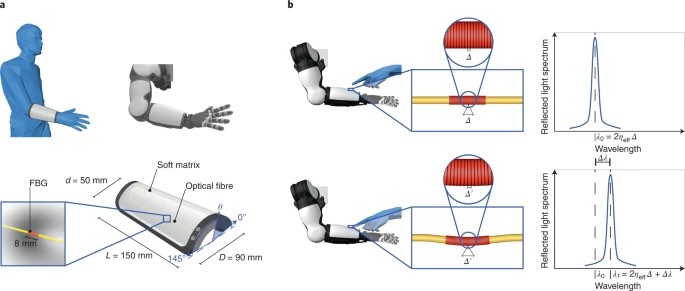
Ci si aspetta che i robot collaborativi interagiscano fisicamente con gli esseri umani nella vita quotidiana e sul posto di lavoro, compresi gli ambienti industriali e sanitari. Una tecnologia abilitante correlata chiave è il rilevamento tattile, che attualmente richiede di affrontare l’eccezionale sfida scientifica per rilevare simultaneamente la posizione e l’intensità del contatto per mezzo di pelli artificiali morbide e conformabili che si adattano su vaste aree alle complesse geometrie curve delle forme di realizzazione dei robot. In questo lavoro viene presentato lo sviluppo di una pelle morbida sensibile ad ampia area con una geometria curva, che consente la copertura totale del corpo del robot attraverso patch modulari. La pelle biomimetica è costituita da una morbida matrice polimerica, simile a un avambraccio umano, incorporata con trasduttori a reticolo di Bragg in fibra fotonica, che imita parzialmente la funzionalità del meccanorecettore Ruffini con diffuso, campi ricettivi sovrapposti. Un algoritmo di apprendimento profondo della rete neurale convoluzionale e un processo di integrazione dei neuroni multigriglia sono stati implementati per decodificare le uscite del sensore del reticolo di Bragg in fibra per l’inferenza dell’intensità della forza di contatto e della localizzazione attraverso la superficie della pelle. I risultati di errori mediani di 35 mN (intervallo interquartile 56 mN) e 3,2 mm (intervallo interquartile 2,3 mm) sono stati ottenuti rispettivamente per le previsioni di forza e localizzazione. Le dimostrazioni con un braccio antropomorfo spianano la strada a skin integrate basate sull’intelligenza artificiale che consentono una cooperazione uomo-robot sicura tramite l’intelligenza artificiale. Un algoritmo di apprendimento profondo della rete neurale convoluzionale e un processo di integrazione dei neuroni multigriglia sono stati implementati per decodificare le uscite del sensore del reticolo di Bragg in fibra per l’inferenza dell’intensità della forza di contatto e della localizzazione attraverso la superficie della pelle. I risultati di errori mediani di 35 mN (intervallo interquartile 56 mN) e 3,2 mm (intervallo interquartile 2,3 mm) sono stati ottenuti rispettivamente per le previsioni di forza e localizzazione. Le dimostrazioni con un braccio antropomorfo spianano la strada a skin integrate basate sull’intelligenza artificiale che consentono una cooperazione uomo-robot sicura tramite l’intelligenza artificiale. Un algoritmo di apprendimento profondo della rete neurale convoluzionale e un processo di integrazione dei neuroni multigriglia sono stati implementati per decodificare le uscite del sensore del reticolo di Bragg in fibra per l’inferenza dell’intensità della forza di contatto e della localizzazione attraverso la superficie della pelle. I risultati di errori mediani di 35 mN (intervallo interquartile 56 mN) e 3,2 mm (intervallo interquartile 2,3 mm) sono stati ottenuti rispettivamente per le previsioni di forza e localizzazione. Le dimostrazioni con un braccio antropomorfo spianano la strada a skin integrate basate sull’intelligenza artificiale che consentono una cooperazione uomo-robot sicura tramite l’intelligenza artificiale.
Principale
I robot collaborativi, o cobot, dovrebbero avere la capacità di interagire con gli esseri umani in uno spazio di lavoro condiviso 1 in diversi scenari, che vanno dalla produzione industriale, trasporto e consegna di merci all’assistenza medica e alla riabilitazione 2 , 3 , 4 . Ci si aspetta che i lavoratori e i cobot collaborino fisicamente in spazi comuni non strutturati e, con la transizione Industria 4.0 in corso, la macchina non sarà più considerata un potenziale sostituto ma piuttosto un compagno, che assiste e integra le capacità umane nell’esecuzione di un’ampia gamma di compiti.
I cobot attuali in genere integrano tecnologie di rilevamento per il rilevamento dei contatti, come sensori di forza/coppia 5 , a complemento dell’identificazione di prossimità 6 , 7. Queste tecnologie portano a vincoli di modularità, scalabilità e retrofit per le macchine installate non collaborative e richiedono anche configurazioni a bassa inerzia e carico utile. Poiché la loro presenza potrebbe essere dannosa per l’uomo, i robot funzionano ancora all’interno di gabbie chiuse e sono tenuti separati dai lavoratori nella maggior parte dei processi. In questo dominio potrebbero verificarsi contatti accidentali o volontari; quindi, la disponibilità di sistemi di rilevamento intelligenti sarebbe essenziale per una coesistenza in ambienti non strutturati. Un robot in grado di percepire, classificare e rispondere al tatto in tutto il suo corpo, imitando idealmente le prestazioni sensoriali umane, potrebbe portare a interazioni più significative e intuitive 8 e maggiore flessibilità, riproducibilità, produttività e riduzione del rischio.
Pertanto, le cooperazioni fisiche sicure e le interazioni con l’ambiente circostante dipendono dalla disponibilità di feedback tattile, essendo il tatto la modalità sensoriale che consente agli esseri umani di raccogliere una varietà di informazioni tattili sul mondo esterno esplorando le proprietà degli oggetti attraverso il contatto e la manipolazione 9 , 10 . Le principali famiglie di meccanocettori umani che forniscono al cervello un feedback a breve latenza per consentire il controllo sensomotorio ad anello chiuso sono innervate da fibre mielinizzate e sono classificate in categorie a seconda della morfologia dell’organo terminale e del posizionamento rispetto alla struttura della pelle, determinando il neurone codifica del segnale meccanico in ingresso 11. I meccanocettori sono definiti come ad adattamento lento (SA) o ad adattamento rapido (FA) a seconda della loro risposta temporale, con le unità SA che rispondono a rientranze sostenute e quelle FA che codificano principalmente i transitori di stimolazione. Le classi di tipo 1 (localizzato in superficie) o di tipo 2 (localizzato in profondità) riflettono invece il posizionamento riferito allo strato epidermico, con impatto principalmente sul campo ricettivo e definizione dei bordi. In particolare, le unità di tipo 1 hanno campi più piccoli e ben definiti con hotspot multipli (cioè regioni con la massima sensibilità all’interno del campo ricettivo), mentre quelle di tipo 2 presentano regioni sensibili sfocate con singoli spot più grandi 12 , 13. La combinazione di risposta temporale e proprietà spaziali restituisce quattro classi principali, ovvero FA1 (corpuscoli di Meissner), SA1 (cellule di Merkel), FA2 (corpuscoli di Pacinian) e SA2 (corpuscoli di Ruffini) 14 . L’integrazione di molteplici output di spiking di meccanocettori dà origine a funzioni percettive nel cervello, come la capacità di determinare la posizione e l’entità del contatto fisico attraverso la pelle 15 . Queste proprietà fisiologiche, insieme a modelli meccanici esplicativi che descrivono le interazioni con materiali morbidi per il rilevamento tattile 16 , 17 , sono diventate una fonte di bio-ispirazione per il presente studio.
Una pelle artificiale ideale bio-ispirata dovrebbe essere costituita da sensori tattili distribuiti su ampie aree curve, in grado di risolvere stimoli tattili con localizzazione millimetrica, sensing di magnitudo millinewton e precisione temporale milliseconda 10 , 12 , 18 . Le pelli artificiali dovrebbero anche essere morbide 19 , estensibili 20 , 21 , 22 , 23 , leggere 24 e conformabili 25 e avere un ingombro minimo di cablaggio. Pertanto, l’applicazione di componenti morbidi per il feedback tattile è fondamentale sia per la loro elevata flessibilità che per la loro conformità intrinseca per consentire interazioni sicure.
continua su https://www.nature.com/articles/s42256-022-00487-3