Calibrazione automatica per sciami di stampanti 3D: il lavoro della University of Arkansas riduce tempi e errori nel cooperative printing
Perché questa ricerca conta davvero nella stampa 3D collaborativa
La ricerca pubblicata sulla rivista Machines di MDPI affronta uno dei problemi più concreti della stampa 3D cooperativa: far lavorare più stampanti robotiche sullo stesso pezzo mantenendo un allineamento sufficiente a evitare giunzioni difettose, vuoti o discontinuità tra le traiettorie di deposizione. Il lavoro è firmato da ricercatori della University of Arkansas e descrive un sistema di calibrazione automatica pensato per il cosiddetto Cooperative 3D Printing (C3DP), cioè un modello produttivo in cui più robot di stampa partecipano contemporaneamente alla realizzazione di un unico componente.
Il limite non era la stampa simultanea, ma l’allineamento tra le macchine
L’idea di usare più stampanti 3D in parallelo non è nuova. Negli anni la University of Arkansas, attraverso il laboratorio AM3 Lab, ha già sviluppato architetture, software di slicing e strategie di pianificazione per distribuire il lavoro tra più robot mobili. Il punto critico, però, resta sempre lo stesso: prima di iniziare a stampare, ogni macchina deve sapere con precisione dove si trova rispetto alle altre e rispetto al sistema di riferimento condiviso. Senza questa fase, la produzione cooperativa resta possibile solo in dimostrazioni controllate o con lunghi interventi manuali di messa a punto.
Come funziona il sistema proposto dai ricercatori
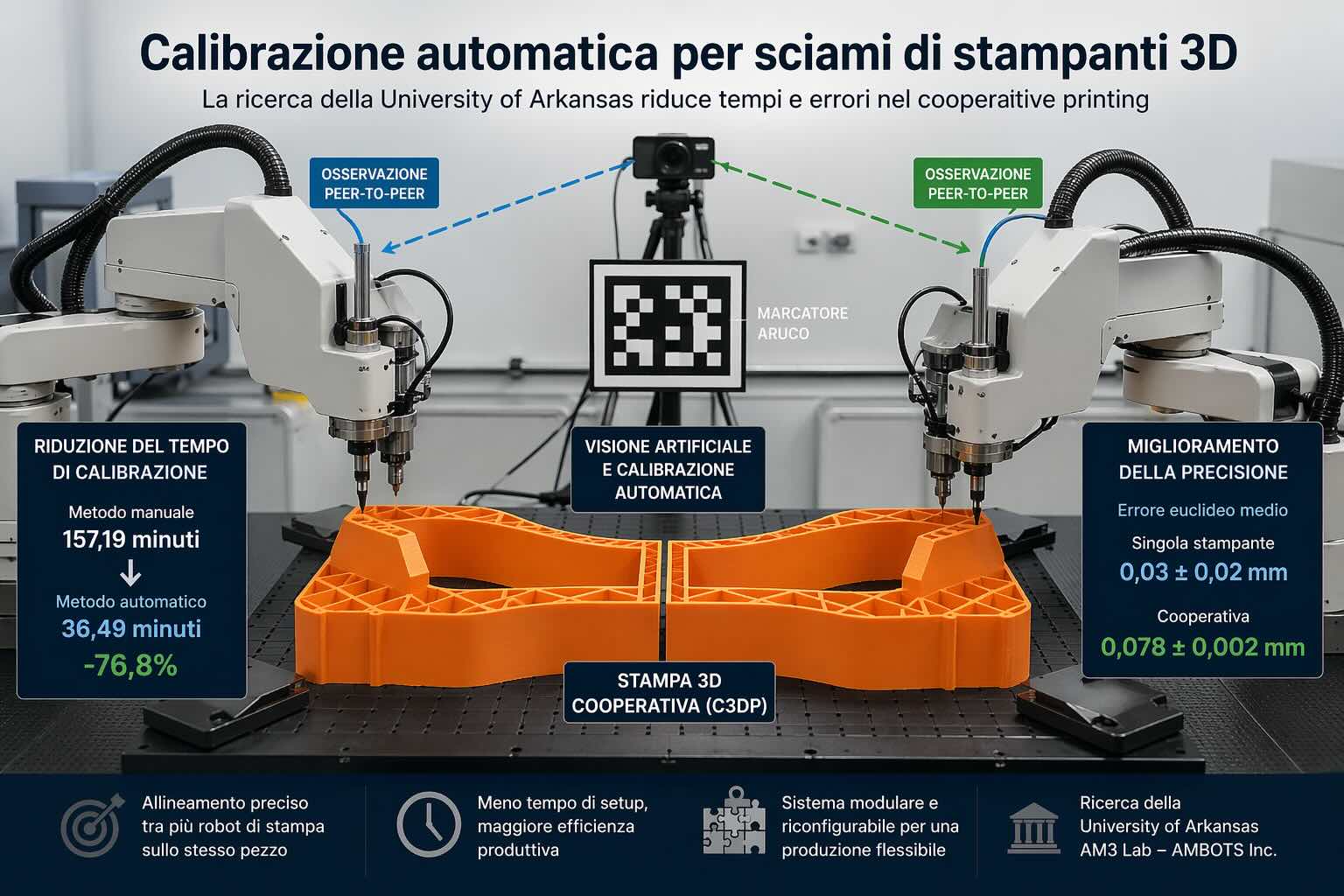
Nel nuovo studio, i ricercatori della University of Arkansas hanno proposto un flusso di calibrazione automatica basato su visione artificiale, marcatori ArUco e telecamere monoculari a basso costo. Il metodo esegue una calibrazione cinematica del singolo robot e una procedura di allineamento reciproco tra le stampanti attraverso osservazioni peer-to-peer, senza richiedere un’infrastruttura metrologica fissa esterna. Questo è un punto importante perché riduce la dipendenza da telai rigidi dedicati, sistemi di motion capture o fixture costruite ad hoc, che aumentano costi, tempi di setup e complessità operativa.
Il risultato più interessante è la riduzione del tempo di calibrazione
Secondo i dati riportati nel paper di Machines pubblicato da MDPI, il workflow automatico è stato testato su una piattaforma FFF con due stampanti robotiche SCARA. In questa configurazione, il tempo totale necessario per la calibrazione è sceso da 157,19 minuti nel metodo manuale a 36,49 minuti con la procedura automatizzata. Oltre al tempo, i ricercatori riportano anche un miglioramento della coerenza posizionale e della qualità di stampa: negli artefatti stampati da una singola macchina l’errore euclideo medio è risultato pari a 0,03 ± 0,02 mm, mentre negli artefatti cooperativi è stato di 0,078 ± 0,002 mm.
Che cosa cambia rispetto agli approcci precedenti
Nella stampa 3D tradizionale i problemi di calibrazione si vedono soprattutto come schiacciamento del primo layer, cuciture tra ugelli o variazioni dimensionali. Nella stampa cooperativa, invece, lo stesso errore diventa strutturale: se una stampante deposita un perimetro e una seconda deposita materiale adiacente fuori allineamento, il difetto si concentra proprio nella zona di unione. Il contributo del nuovo lavoro non è soltanto aver automatizzato un passaggio manuale, ma aver reso più credibile una produzione distribuita in cui più robot possano essere aggregati e riconfigurati rapidamente all’inizio del job.
Il lavoro si inserisce in una traiettoria tecnologica già avviata
Questo studio non nasce in modo isolato. La University of Arkansas lavora da anni sul tema della manifattura cooperativa e della stampa 3D a sciame. Le pubblicazioni precedenti del gruppo hanno riguardato slicing chunk-based, pianificazione decentralizzata, scheduling con vincoli di risorsa e resistenza meccanica delle parti stampate in modo cooperativo. In parallelo, la startup AMBOTS Inc., nata per commercializzare queste tecnologie, dichiara di sviluppare soluzioni di swarm 3D printing and assembly derivate dalle attività dell’AM3 Lab e di aver realizzato software per coordinare gruppi di robot su lavori condivisi.
Perché può interessare anche al mercato industriale
Dal punto di vista industriale, la promessa è chiara: invece di investire in una sola macchina di grandi dimensioni, un’azienda potrebbe usare più sistemi più piccoli e modulari, riconfigurandoli in base al pezzo da produrre. Questo approccio è coerente anche con il brevetto “Cooperative 3D printing platform” attribuito alla University of Arkansas, che descrive una piattaforma composta da più stampanti motorizzate capaci di muoversi e cooperare sullo stesso oggetto. In prospettiva, la calibrazione automatica diventa quindi un tassello abilitante per trasformare una dimostrazione di laboratorio in una linea produttiva più flessibile.
Dove si colloca AMBOTS in questo scenario
La presenza di AMBOTS Inc. è rilevante perché mostra il passaggio dalla ricerca universitaria alla possibile industrializzazione. La società afferma di commercializzare tecnologie di stampa e assemblaggio a sciame sviluppate all’interno dell’AM3 Lab della University of Arkansas. Fonti universitarie e aziendali collegano inoltre Wenchao Zhou sia alla direzione della ricerca accademica sia al percorso imprenditoriale di AMBOTS, segnalando che la traiettoria del progetto non riguarda soltanto il laboratorio, ma anche la costruzione di una piattaforma produttiva con sbocco commerciale.
Che cosa resta da verificare
Il risultato è tecnico e promettente, ma va letto per quello che è: un avanzamento su una piattaforma sperimentale a due stampanti robotiche, non ancora la prova che sciami numerosi siano pronti per una produzione diffusa su larga scala. Restano da osservare il comportamento del sistema con più unità contemporanee, la gestione delle derive nel corso di stampe lunghe, l’impatto sui materiali diversi dal classico FFF e l’integrazione con algoritmi di pianificazione e controllo più ampi. Proprio per questo il paper è interessante: non perché chiuda il problema, ma perché affronta uno dei colli di bottiglia più concreti verso una manifattura additiva realmente cooperativa.