GLI SCIENZIATI SVILUPPANO UN ROBOT “A PROBOSCIDE DI ELEFANTE” A BASSO COSTO UTILIZZANDO LA TECNOLOGIA DI STAMPA 3D
Un team di ricercatori dell’Università di Tubinga e dell’Università della tecnologia di Graz ha stampato in 3D un braccio robotico in grado di imitare i movimenti della proboscide di un elefante.
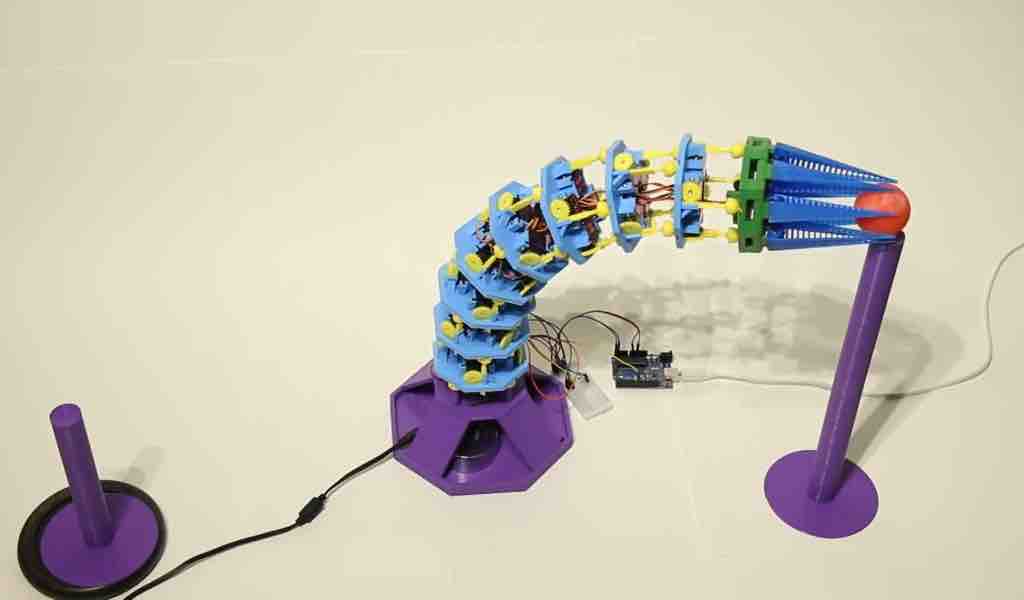
Dotato di una pinza sulla punta, il robot stampato in FDM utilizza l’apprendimento automatico per muoversi e adattarsi a nuovi compiti, come raccogliere le biglie e posizionarle sui podi. Sviluppato come un proof-of-concept a basso costo, il design potrebbe eventualmente essere utilizzato su una linea di produzione industriale dove sarebbe in grado di eseguire una più ampia varietà di operazioni flessibili, come il trasporto di parti automobilistiche o l’assemblaggio di dispositivi elettronici.
Il dott. Sebastian Otte, un coautore dello studio, ha dichiarato a New Scientist : “Il nostro sogno è che possiamo farlo in una configurazione di apprendimento continuo in cui il robot inizia senza alcuna conoscenza e poi cerca di raggiungere gli obiettivi, e mentre lo fa questo genera i propri esempi di apprendimento. “
I tronchi di elefante sono una delle opere più belle dell’evoluzione. Sono parti uguali flessibili e forti e forniscono agli elefanti un livello di destrezza che non si vede spesso nel regno animale. Di conseguenza, sono una fonte di ispirazione per molti progetti bionici moderni nel mondo accademico, con attuatori pneumatici che spesso agiscono come fibre muscolari artificiali per ottenere flessione ed estensione.
Otte ei suoi colleghi hanno optato per un design modulare, che si basa su una serie di moduli di giunzione impilabili e uniformi con tre gradi di libertà (DoF) ciascuno. Il design attuale presenta fino a dieci di questi moduli, ma secondo quanto riferito la lunghezza del robot può essere raddoppiata con l’uso di motori più potenti.
Ogni segmento del bagagliaio ospita diversi motori che azionano ingranaggi che possono inclinare il modulo fino a 40 ° su due assi contemporaneamente. Oltre a piegarsi, il tronco robotico è anche in grado di allungarsi e accorciarsi, proprio come la cosa reale. Sfortunatamente, calcolare la cinematica inversa per gli attuatori robotici per eseguire operazioni complesse non è un compito facile, tanto meno con così tante DoF. È qui che entra in gioco l’intelligenza artificiale.
Il team ha utilizzato quella che viene chiamata una rete neurale spiking (SNN) per controllare il robot, che è una rete neurale artificiale che imita da vicino i processi naturali del cervello. Oltre a incorporare stati neuronali e sinaptici, gli SNN includono anche il concetto di tempo nei loro modelli. Osservando una serie di movimenti di addestramento, l’SNN è stato in grado di mappare i movimenti motori alle corrispondenti pose del robot, consentendo al team di “srotolare” i modelli per la navigazione guidata da obiettivi con precisione quasi millimetrica.
I ricercatori scrivono: “Non solo abbiamo dimostrato che è possibile costruire bracci robotici simili a tronchi a basso costo con apparecchiature di stampa 3D di base, ma abbiamo anche dimostrato come possono essere controllati utilizzando le più recenti architetture di rete neurale a picchi ricorrenti”.
Per quanto riguarda la ricerca futura, il team ha espresso la possibilità di incorporare sensori di distanza basati su radar per implementare la funzionalità di prevenzione delle collisioni, consentendo al dispositivo di lavorare in tandem con gli esseri umani. Un altro percorso potrebbe essere quello di tradurre il lavoro in un robot simile a un serpente piuttosto che in un braccio fermo, per cui potrebbe “strisciare” per le operazioni di ricerca e soccorso.
Ulteriori dettagli dello studio possono essere trovati nel documento intitolato ” Many-Joint Robot Arm Control with Recurrent Spiking Neural Networks “. È coautore di Manuel Traub, Robert Legenstein e Sebastian Otte.
La robotica a basso costo è un ottimo esempio di come la stampa 3D può essere applicata per risolvere problemi astratti. Un team di ricercatori dell’Università Meiji di Tokyo, ha recentemente personalizzato una stampante 3D FDM per creare un robot di produzione “tutto in uno” a basso costo . Il Functgraph è in grado di stampare e collegare automaticamente teste di utensili personalizzate per modificare la sua funzionalità attiva, consentendo agli utenti di afferrare, ruotare e rompere oggetti stampati in 3D per assemblare complessi sistemi meccanici in un unico lavoro di stampa.
Altrove, gli scienziati dell’Università cinese di Tianjin hanno precedentemente stampato in 3D un robot personalizzabile in grado di ridimensionare e monitorare i tubi negli impianti industriali in tempo reale. Il dispositivo monopezzo è dotato di una serie di meccanismi di piegatura morbida e pinze modulari, che gli consentono di arrampicarsi in modo flessibile su infrastrutture dalla forma strana.